ロボットTA研究報告書
2007年度学術交流資金
安村通晃†1
高石悦史†2
菅原 圭†1
Jamy
Li†3
慶應義塾大学
環境情報学部†1,政策・メディア研究科†2
University of
Toronto†3
目次
1. はじめに-------------------------------------------------------------------------------------
3
1.1
研究の概要
1.2
本報告書の構成
1.3
本プロジェクトの担当者とその役割
1.4
謝辞
2. ロボットTA研究(その1)---------------------------------------------------------
4
2.1
授業におけるコミュニケーションの意識調査
2.2
TAについての考察
2.3
ロボットTAの提案と期待度の調査
2.4
授業支援ロボットに適した発話音質の評価
3. ロボットTA研究(その2)
--------------------------------------------------------18
3.1
研究の概要
3.2
予備調査
3.3
ロボットTA実験
3.4
へぇボタン実験
3.5
まとめ
4. ジェスチャー研究
------------------------------------------------------------------------ 27
4.1
概要
4.2.
方法
4.3
結果
4.4
まとめ
5. おわりに
------------------------------------------------------------------------------------
29
1. はじめに
安村通晃
1.1 研究の概要
慶應SFC を筆頭とする日本の大学の多くは,AO入試制度,授業評価,シラバス,24時間キャンパス,外国語重視,IT科目の重視,Webでの教材資料公開等,世界の主要な大学に負けないほどの大学教育の充実を見せているが,唯一,授業中における質問の量の低さは,北米の大学と依然として開きがある.教員の側でも学生との間のコミュニケーションを活発化させようとする努力はされてはいるものの,学生の側からすれば,授業中の質問は恥ずかしいとか一人で後ほど学ぶべきだと言うような意識からなかなか質問する雰囲気にはなってないのが実情である.
一方で,ロボットを教育に持ち込もうとする試みはいくつかあるが,その多くは,遠隔での教員の操作によるものか,あるいは教員の身代わりになる,という位置づけのものが大部分である.
ここでは,授業におけるTA (Teaching Assistant) の役割に注目する.TAは教員と学生の中間に位置し,学生の気持ちも教員の気持ちもどちらも良く分かる立場にあり,ときには,教員の手助けもするし,またときには,学生の代わりに,学生が分かりにくいと感じる部分を質問したりもする.
我々はこの,TAの替わりをロボットが果たせないかと考え,ロボットTAシステムを構想し,その基礎実験や実証実験,および付加的な関連評価実験を行なったので,ここに報告する.
1.2 本報告書の構成
本報告書は,大きく3つの部分から構成されている.
最初の部分(第2章)は,学生の授業に対する意識調査,ロボットTA導入の可能性の検討,および,ロボットTAの声質に関する評価について述べる.
次の部分(第3章)は,教員の側の授業に対する意識調査,実際の授業の解析,ロボットTAを導入した場合の影響の調査,および,へぇボタンシステムを導入した授業改善の実験について述べる.
最後の部分(第4章)では,ロボットTAのモデルとなった,RobotPhoneシステムにジェスチャーを行なわせた時の意味を,動作の振り付け側と,動作を観察する側の両者から分析した結果について述べる.
1.3 本プロジェクトの担当者とその役割
本プロジェクトの直接の担当者とその主な役割は次の通りである.
・安村通晃:環境情報学部教授 テーマの提案と全体統括
・高石悦史:政策・メディア研究科修士2年 ロボットTAシステム試作とへぇボタン設計
・菅原 圭:環境情報学部4年 ロボットTA予備調査,ロボットTA音声評価
・Jamy Li:カナダトロント大からの留学生 ジェスチャー研究
1.4 謝辞
本プロジェクト実施において,その研究遂行に協力頂いた次の方々に感謝したい:
・Mark Chignel (トロント大学教授),溝渕佐知(ノキア研究員),樋口文人(SFC非常勤講師),
鎌田麻衣子(政策・メディア研究科修士2年),吉田諒(同修士1年).
また,ロボットTAの評価実験に協力頂いた教員・学生の皆様にも感謝したい.
2. ロボットTA研究(その1)
菅原 圭
2.1 授業におけるコミュニケーションの意識調査
ロボットTAのニーズを調べる事前調査として大学の授業における教師・学生間のコミュニケーションに対する意識調査を行なった.
日本の大学の授業では学生の自発的な質問行動がほとんどないとよくいわれる.授業は教師が喋り続けるだけの単一方向的なもので,学生はただそれを聴いているだけというスタイルが際立っている.
このような授業形式が本質的な原因であるのかは定かではないが,授業内での教師・学生間のコミュニケーションはあまり活発でないというのが現状であることは確かである.
コミュニケーションの活発化が何故授業に必要かというと,それによって授業を活性化させ学生を授業へより能動的に参加させられることが期待できるからである.また,双方向的な授業の活性化によって学習効果が高まり理解も促進されるとされており,授業効果を高めるためにもコミュニケーションの活発化は必要である.
2.1.1 アンケート調査
授業内での教師・学生間のコミュニケーションについて学生を対象にアンケートを行なった.アンケートはほとんどが5段階評価で,回答者は21名ですべてSFC(慶應義塾大学湘南藤沢キャンパス)の学生である.このアンケートにおける授業とは講義形式の授業という前提で回答してもらった.最初に,授業中の教師とのコミュニケーションの重要性について質問した(図2-1).
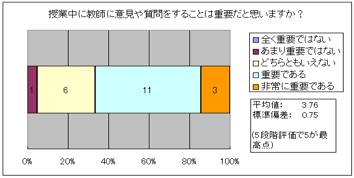
図2-1. 授業中に質問することは重要だと思うか
この結果,重要であると答えた回答者が最も多く,コミュニケーションに対する重要性の認識は高い.重要でないと答えた回答者の理由は,授業の進行が遅れることを危惧したものであった.
次に,実際に授業中に質問や意見をするようにしているか聞いた(図2-2).
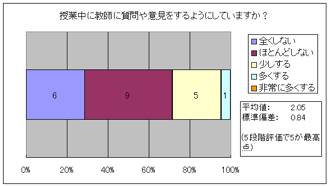
図2-2. 授業中に質問や意見をするようにしているか
ほとんどしないという回答の傾向が強かった.仮説通りの結果ではあるが,コミュニケーションの重要性の意識と実際の行動とにギャップがあることがうかがえる.
この質問で,全くしない・ほとんどしない,と答えた回答者にその理由を答えてもらった(図2-3).
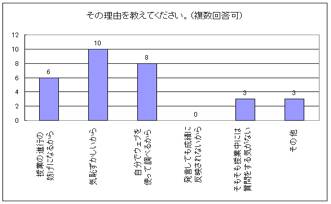
図2-3. 授業中に質問をしない理由
授業中の発言は気恥ずかしいからという理由が最も多く,自分でウェブを使って調べるからという理由がそれに続いた.自分でウェブを使って調べるというのは授業にコンピュータを持ち込み,かつネットワーク接続ができる教室環境であるという条件が必要であり,極めて現代的な現象である.このことが授業中の質問意識をさらに低下させる要因となっている可能性も考えられるが,逆にウェブから関連した知識を獲得することでそれが質問を誘発する要因になる可能性も考えられる.その他を選択し記述してもらった回答には,その時点で質問が思い浮かばないことが多い,という回答があった.自発的に質問する場合は,授業の進行内容と質問内容がずれていると質問しにくくなることがうかがえる.
さらに,この質問の回答者には,質問や意見をするならばそれは授業中にするべきかどうかという意識を尋ねた(図2-4).
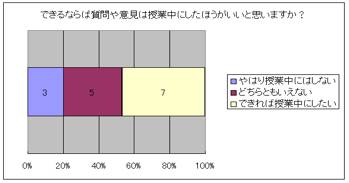
図2-4. 質問は授業中にしたほうがいいと思うか
どちらともいえないとした回答者も多かったが,おおよそ半数はできれば授業中にしたいと回答した.授業中に質問はほとんどしないという回答者のなかにも,できれば授業中に質問をしたいという意識の傾向があることがうかがえる.
最後に,授業中に教師から質問や理解度の確認を積極的にして欲しいと思うか全員に尋ねた(図2-5).
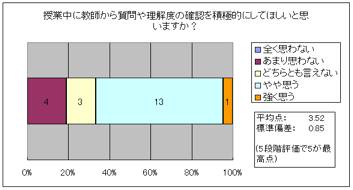
図2-5. 授業中に教師から学生に質問をして欲しいと思うか
やや思うと答えた回答者が最も多く,全体として肯定的な傾向であった.
図2-1の結果と合わせると,学生は授業中の教師とのコミュニケーションの重要性は認識しており,教師からのコミュニケーションに対する要望は高いということがわかる.
2.1.2 教師へのアンケート調査結果との比較
SFCの教師へのアンケート調査も同時期に行なった.この調査では,教師側の授業中のコミュニケーションに対する意識を調査した (回答者15名).なお、この調査に関しては、3.2.1でも再度取り上げる.
まずは,コミュニケーションの重要性の意識について学生の結果と比較する.
(1) コミュニケーションの重要性の認識
・学生とのコミュニケーションは重要だと思うか
平均値4.27
・教師とのコミュニケーションは重要だと思うか
平均値3.76
どちらも意識は高い傾向にあり,特に授業の運営側である教師は顕著である.授業内でのコミュニケーション不足という実態に反して,重要性の認識は高いようである.
次に,教師のコミュニケーションを図る意識と学生の自発的な質問行動への意識を比較する.
(2) 教師側の工夫と学生の自発的な質問行動の比較
・学生とコミュニケーションを図るための工夫をしているか 平均値3.73
・授業中に教師に質問や意見をするようにしているか 平均値 2.05
教師がコミュニケーションを図るための工夫をしているにも関わらず,学生が授業中に質問や意見をしようという意識は低い.ここで教師が行なっている工夫が学生からの自発的な質問を促すような種類のものではないのかもしれないが,学生の自発的発言を促すような効果は発揮されていないことがこの調査ではうかがえる.
以上のアンケート結果から教師・学生双方ともコミュニケーションに対する意識や要求は高いにも関わらず,うまく実現できていないことがうかがえる.
教師はコミュニケーションを図る工夫をしているが,学生は意見や質問をあまりしようとしていない.しかし,潜在的にはできれば授業中に質問したいという意識傾向が見受けられる.
2.2 TAについての考察
2.2.1 TAの役割
TAの業務は,従属する教師や授業形式によって多種多様であるが,大別すると次の2種類である[1].
(1) 事務的業務
(2) 教師的業務
前者は,教材の配布や提出物の回収,機器の操作など事務的な作業を行なうことによって授業の進行をサポートするものである.後者は,学生からの質問への回答や個別相談など教師だけでは手の届かない範囲での学生へのサポートを行なうものである.
具体的な業務内容は主に以下のようなものがある.
(1) 事務的業務
‐出欠確認
‐配布物の印刷・配布と提出物の回収
‐レポートの採点の補助
‐機器の準備や操作など授業や教室の環境整備
(2) 教師的業務
‐学生からの質問の受け付けと回答
‐学生への個別指導(学習相談など授業内容以外の相談も含む)
‐授業中の教師への質問など授業を盛り上げる発言を行なう
‐講義の一部を担う
さらに,TAがその役割をこなすことで授業に期待されている効果は、以下のものが考えられる.
・アイスブレーキング
・授業進行の円滑化(機器の準備や操作,演習時の学生へのサポートなど)
・授業の盛上げ・授業へのひき付け(TA自ら教師へ質問・コメントを行なう,TAが授業を行なうなど)
・教師と学生間のエージェント(学生が教師へ質問しづらい場合に代行する)
特に講義形式の授業は単一方向的な授業形式であるのでTAは全体の雰囲気を調節し,授業が単調にならない工夫をすることが期待されている.
以上をまとめると,
TAに期待されていることは
「教師・学生間のコミュニケーションを活性化させること・授業を活性化させる」
ことである.
2.2.2 TAの現状
演習形式の授業においては,もともとそれらの支援必要性がありTAが導入されたということもあって,概ねTAは活用されているようである.業務は実験機器の準備や操作などから演習中の学生への個別指導・質問への対応など多岐にわたる.
一方,講義形式の授業の場合は授業の進行上の問題からTAが教室内を回って学生に個別にサポートを行なうということはなく,TAの業務は教師の補助が中心の事務作業となる.演習とは異なりTAが授業の活性化に関わることはほとんどない.
これに関しては,教師だけが喋り続ける講義形式の授業は一方通行的な授業に陥る可能性がある,という問題意識も提起されており,TAにレポートへの取り組み方や自分の研究内容の紹介などの話をさせる機会をつくるといった取り組みを行なっている報告も見られる.授業中にTAの説明や経験談を挿入することによって,授業の進行にアクセントをつけることが意図されている.
以上のことから演習形式の授業においてTAは有効活用されているとみてよいが,講義形式の場合は特に教師的業務についてほとんど活用されていないようである.それはもともと潜在的な必要性がないからであるかもしれないし,TAを活かしきれない授業の工夫の問題なのかもしれない.
以上の仮説に関して実態を知るために,学生へ講義形式におけるTAについてどう思っているかアンケート調査を行なった.
2.2.3 TAについてのアンケート調査
アンケート調査では,授業中のTAの貢献度について,TAを授業へもっと参加させるべきか,という2点について学生に対して質問を行なった.ただし,授業については講義形式のもの,TAの業務は授業中の教師的業務に関するものと限定した.回答は5段階評価で,質問ごとに回答の理由について自由記述してもらった.回答者は21名で,全員20代前半の学生である.
1つ目の質問では,授業中のTAの貢献度について評価してもらった(図2-6).
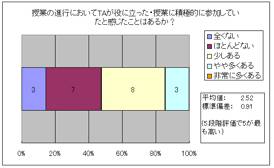
図2-6. TAが役に立ったと感じたことはあるか
あるという回答とないという回答で評価が分かれたが,全体としてはやや否定的な結果となった.あると答えた回答者にそのときのTAの業務を聞いてみたところ以下のようなものがあった.
・学生の発表内容について積極的にコメントをしていた
・講義の一部を担当していた
・講義を1回分担当し自分の研究内容を説明していた
・教師と対話形式で講義を進めていた
・誰からも質問がないときに質問を行なう
「講義形式の授業での授業中のTAの教師的業務」からは外れる回答もややあり,回答者によっては質問の意図が充分に伝わっていなかったと思われる.その点を考慮しても,講義形式の授業ではTAはあまり活用されていない様子がうかがえる.
2つ目の質問では,授業にもっとTAを貢献させるべきかを聞いた(図2-7).
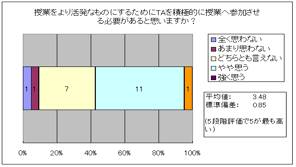
図2-7 TAを積極的に授業に参加させる必要はあるか
「やや思う」と答えた回答者が最も多く,全体として少し肯定的な結果となった.肯定的な回答の理由としては以下のようなものがあった.
・TAがしっかりしていると授業への安心感がでる
・教師の話だけだとつまらない場合があり,TAの発言により学生は退屈しなくなる
・TAの発言で学生が質問しやすい雰囲気になることがある
・簡単な質問はTAが行なうとよい
・TAが架け橋となることで,学生からの意見・質問が多くなれば授業はより活発になる
・年が近く割りと親近感を持てるTAが関わると,授業により興味を持てるかもしれない
逆に否定的な回答の理由としては以下のようなものがあった.
・TAの能動的参加以上に教師・学生自身が質問態度を改めるべき
・必要もないのにTAが出てくるのは好ましくない
・先生自身が魅力的な場合は必要ない
・TAが積極的に参加している授業のイメージが分からない
講義形式の授業では学生はもっとTAの授業への介入を望んでいるという潜在的なニーズが比較的高いことがうかがえた.
2.3 ロボットTAの提案と期待度の調査
TAの役割を課したロボットのことを本研究ではロボットTAと呼ぶ.
ロボットTAが行なうことができる業務はそのロボットの性能・形状によって異なってくるが,本研究では講義形式の授業において授業中に行なう教師的業務を想定している.
2.3.1 背景
ロボットTA研究は,もともと授業における教師・学生間のコミュニケーション不足を問題意識としている.授業中になかなか学生から質問や意見が出にくいという状況に対して,講義形式の授業ではあまり活用されていないTAをもっと活用することで解決が図れないかと考えたことに端を発する.
その際に人間のTAだけではなくロボットのTAやアバターのTAについても授業での使用が考えられた.特にロボットについては教育に応用された場合の具体的な応用例について検討する必要性があり,ロボットを中心に据えたロボットTAの研究を始めるに至った.
2.3.2 使用したロボットについて
本研究では,ロボットとして既製品のIP RobotPhoneを使用した(図2-7).これはIP電話のインタフェースとしてのロボットであり,外見はクマのぬいぐるみである.一方を動かすことで,通信が繋がっている他方に同じ動きを同期させコミュニケーションを行なうことができるようになっている.
可動部位は首と両腕のみで,ロボットを操作して移動させることはできない.このロボットの動作をプログラムすることができる開発キットが提供されているので動きの作成にはこれを利用した.

図2-7. IPRobotPhoneの外見と中身
2.3.3 想定される授業支援方法
ロボットTAの業務はそのロボットによって規定されるが,今回のロボットの場合は据え置き型のロボットであり動作の自由度が低いのでかなりの業務が制限される.そこで,授業の進行状況に応じて適切なタイミングで動作を行なう,または音声により教師に話しかける,という使用方法を考えた.
ロボットの動作は自動化されるのが望ましいが,技術的に高度なため背後で人間が操作するWizard of Oz方式で行なう.すなわち,背後で人間が学生の様子や授業の内容をうかがいつつ,適当なタイミングでロボットTAを操作し,授業に介入させるのである.
この時,学生側はロボットの操作に直接関わることはできない.また,操作する人間は教室の背後または前方から教室の監視をする.この際に誰が操作しているのか学生に気付かれないようする注意が必要である.
教室内での位置関係は図2-8のようになり,ロボットは教室の手前に学生に対面して配置する.
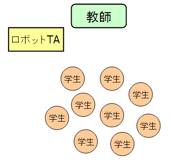
図2-8. 教室内での位置関係
ロボットTAを動作させるタイミングは操作する人間が判断することになり,決められた基準があるわけではないが,次のような文脈で動作させるのが望ましいと考える.
・学生がつまらなさそうにしているとき
・発言したさそうな学生がいるとき
・授業の進行が速すぎると感じたとき
・授業の説明がわかりにくいと感じたとき
・教師の説明だけが続き授業が単調になったと感じたとき
このような状況でロボットTAを動かし,授業の進行にアクセントをつけたり,学生を授業にひき付けるのが狙いである.
これによって学生からの質問や意見が促されたり,人間のTAが同じことをやるより授業自体が面白くなればロボットTAは効果的であると考える.
2.3.4 ロボットTAへの期待度
ロボットTAシステムへの期待度を調べるために学生へアンケート調査を行なった.
あらかじめRobotPhoneを動かして見せ,授業内で上述した働きをすることを説明し,そのような授業を継続して受けてみたいか回答してもらった(図2-9).
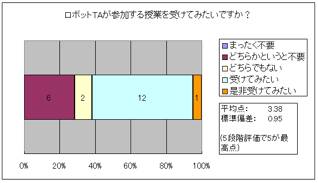
図2-9. ロボットTAが参加する授業を受けてみたいか
結果は若干肯定的な傾向になった. TAを授業に積極的に参加させる必要があるかという質問 (図2-7)と平均値はあまり変わらないが,どちらかというと不要という回答の比重がやや大きくなり,ロボットTAの参加については慎重な姿勢の回答者が増えたことがうかがえる.
肯定的な回答の理由としては以下のようなものがあった.
・見ていて面白そう
・和む
・授業に張りが出そう
・人間のTAよりも興味を引きやすそう
・今までにないシステムなので体験してみたい
否定的な意見としては以下のようなものがあった.
・時間が経つにつれ飽きてくると思う
・ロボットに気をとられている間に授業が進んでしまう
・授業へのモチベーションがロボットTAによって変わることはない
システムは口頭で説明しただけなので,システムの良し悪しというよりもロボットTAの存在自体が授業の邪魔になるかならないかという意見が多かった.
他には,学生の意見をロボットTAが代弁してくれるようなシステムなら良い,ロボットの動きがよく見えるのであれば使ってみたい,という意見もあった.
2.4 授業支援ロボットに適した発話音質の評価
2.4.1 研究の背景と目的
コミュニケーションロボットが備えるべき要件として対話機能がある.対話におけるロボットの声を考えたとき,それは人間にとって親和性が高い音質であることがコミュニケーションを円滑に進めるうえで望ましい.
そこで本研究では,授業ロボットに適した発話音質の評価実験を行ない,どのような音質が,対人親和性が高いかを明らかにする.
声と容姿は強く関係しているので,個別具体的な対象について研究を行なっていく必要がある.本研究で扱うロボットはクマのぬいぐるみ型ロボットIP RobotPhoneである.よって,評価対象は授業ロボットという役割を演じたときのIP RobotPhoneの発話音質ということになる.
2.4.2 評価実験
(1) 実験方法
あらかじめ用意した4種類の音声について被験者に主観評価してもらう.用意した音声はボイスチェンジソフトを利用して人間の声から作成した次の4種類である.
・男性 ‐ 最も低い落ち着いた喋り方,大人の男性
・女性 ‐ 子供より低く理知的な喋り方,若い女性
・子供 ‐ 最も高く幼い喋り方,幼い少女
・ロボット ‐ 音声合成的な声で抑揚はない
これら4種類の声につき,3通りの発話内容を用意した.また,それぞれの発話内容につき真面目な口調とくだけた口調の2パターンを用意した.これらは授業中にロボットTAが先生に対して発話する内容を想定している.
(発話内容)
・真面目な口調
‐ 先生,皆さんつまらなさそうですよ
‐ 先生,今の話がよく分からないのですが
‐ 先生,ちょっとペースが速すぎです
・くだけた口調
‐ 先生,みんなつまらなさそうにしてんだけど
‐ 先生,今のところがよく分かんないんだけど
‐ 先生,ちょっとペース速いんだけど
被験者には4種類の音声を順番に聞いてもらう.発話内容は実験者がランダムで流していくが,被験者はいつでも聞きなおすことができる.1種類の音声を聴取するごとに評価を行なってもらう.実験の手順は図2-10に示す通りであり,これを4パターンについて行なっていくことになる.
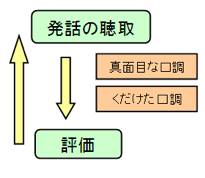
図2-10.実験の手順
評価項目は以下の通りである.項目1以外は5を最高点とする5段階評価である.
(評価項目)
・どちらの口調が適していたか
・親しみのある音声だったか
・授業の邪魔にならない音声だったか
・授業支援ロボットとして適している音声だったか
また,4種類すべての音声を聞いてもらった後に,総合評価として授業支援ロボットの発話音質として最も適していたもの・適していなかったものをその理由とともに聞いた.
(2) 実験条件
実験条件は以下の通りである.
(実験条件)
・被験者
‐ 人数: 20名(男性: 12名,女性: 8名)
‐ 年齢構成: 全員20代
・聴取環境
‐ ほとんど騒がしくない研究室
‐ RobotPhoneに対面して椅子に座る
‐ ヘッドフォン受聴
(3) 実験前の説明
音声に聴取にあたっては,目の前にあるRobotPhoneが喋っているということ,そして授業中にロボットTAとして喋っているということを想定してもらった.また,音質の評価が目的であるので発話の内容は考慮しないようにお願いした.
2.4.3 結果
項目ごとの平均を図2-11に示す.
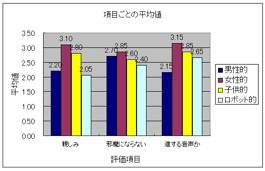
図2-11. 項目ごとの平均値
全体として女性の声が最も評価が高かったが,それでも平均が親しみ3.10,適性3.15と中央値を若干上回った程度であり,他の音質とそれほど差が開いたわけではない.これは被験者によって聞きやすいと感じる音質が人それぞれであり,適度に分散したからだと考える.
以下,個別の項目について具体的な結果を示す.まず,授業支援ロボットとしてどちらの口調が適していると感じたかという質問に対しては,図2-12のような結果となった.
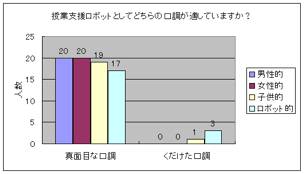
図2-12. 適している口調
ほとんど全員が真面目な口調が良いと回答した.その理由としては,ロボットであっても先生に対する口調としてくだけたものは失礼,くだけると頼りない感じがする,授業の場にはくだけた口調はあわない,といったものがほとんどであった.逆にロボット声ならくだけていてもいい,人間の声はくだけるとしまりがないが,ロボット声はくだけたぐらいがいい,とロボット声ならくだけていても良いという回答もあった.
親しみを感じるかという質問では,女性の声が最も高い評価で,子供の声がそれに準じた (図2-13).
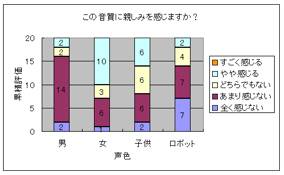
図2-13. 親しみを感じるか
他の2つの音質とも平均値は開きがあり,傾向として女性・子供の声の音質に親しみを感じるということがうかがえる.
授業の邪魔にならないかという質問では,すべての平均が中央値を割る結果となった(図2-14).
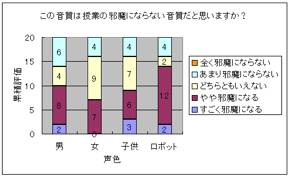
図2-14. 授業の邪魔にならないか
男性の声はあまり親しみを感じないという評価が多かったが,授業の邪魔にならないという評価も多い.このような回答をした被験者に理由を聞いてみたところ次のような回答が多かった.
・真面目そうで大人っぽいから授業には適している
・ふつうの生徒のようなので授業の邪魔にはならない
・落ち着いていて勉強の場にふさわしい
実際に授業で使用したときに適する音質かという質問では,図2-15に示す通り,女性の声がもっとも高い評価となったが,ロボットの声も親しみをあまり感じなかったという評価のわりには高い評価となっている.また,授業で邪魔にならない音質では評価の高かった男性の声がもっとも低い評価となっている.授業の邪魔にならない音質でも,ロボットTAには適さない音質であることがわかる.
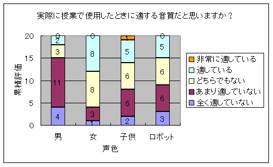
図2-15. 実際に使用したとき適する音質か
すべての声を聞いてもらった後,最も適した音質・最も適さない音質を回答してもらった(図2-16).
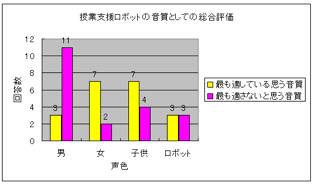
図2-16. 総合評価
子供と女性の声が最も高い評価であり,この範囲の音質に高い親和性があるということがうかがえる.一方,男性の声が最も適さないという傾向があることもわかった.
2.4.4 考察
実験を行なう前に,授業ロボットという条件を課さずにこのロボットと日常的に会話するならどのような声が良いと思うか自由記述してもらった.その結果と授業ロボットという役割を課した実験結果を比べてみると,4分の3の被験者は最初に記述してもらった声のイメージとほぼ同じような音質を選択していた.残りの被験者は日常的に会話する場合と授業ロボットという役割を課した場合に期待する声のイメージを分けて評価していた.役割によって期待する声のイメージよりも,ロボットの容姿によって期待される声のイメージに優先性や志向性があるという傾向が示唆される.
また,ディスプレイ上のエージェントキャラクタの発話音質について親和性を評価する研究は既にあり[2],その研究ではキャラクタの容姿によってイメージされる音質は一定のピッチに限定されることが示唆されている.本研究でも,子供・女性の音質の範囲に評価が収束されていくことが分かった.
2.4.5 今後の課題
本研究では,ぬいぐるみロボットについて音質評価を行ったが,より精度を高めるためにロボットの数や種類を増やして評価を行なう,アバターとの音質評価の比較を行い差異を検証するなど,対象の範囲を広げた実験が必要である.
参考文献
[1] 小笠原正明, 西森敏之, 瀬名波栄潤: TA実践ガイドブック,玉川大学出版部 (2006)
[2] 高野智大,米村俊一,西山茂:インタフェースエージェントの容姿と日本語合成音声との親和性の検討,電子情報通信学会技術研究報告,Vol.99, No.721 (HCS99 66-71), pp.21-27
(2000)
3. ロボットTA研究(その2)
高石悦史
3.1 研究の概要
ここでは,特に以下の調査結果と実験について述べる.
・授業中の行動・コミュニケーションに関する予備調査
・ロボットの授業への影響を検証するための実験
・授業中にリアルタイムで学生の理解,興味を共有するためのツールの実装とその実証実験
3.2 予備調査
3.2.1 教員アンケート
実際の授業の状況を調べるため,教師を対象としたアンケート調査を実施し,授業におけるコミュニケーションに対する意識と,実際の取り組みや授業の進行の工夫,また,IT を用いた授業支援に対する意識についても調査した.
(1) 調査の概要
アンケートの回答は,メールとアンケート用紙への記入の2種類の方法で行なった.自由記述式の設問と,質問に対する 5 段階の選択式の設問の計9問からなり,15名の回答を得た.主な質問項目は,授業の規模,授業中のコミュニケーションの重要度,コミュニケーションを増やすための工夫,学生の理解度の把握,IT を利用した授業支援について,となっている.
(2) アンケートの結果
表3.1~表3.4にアンケートの結果を示す.表3.1,表3.2は授業中のコミュニケーションについての質問であり,5段階で数値が大きい程,質問への同意が強いことを示している.
表3.1 教員アンケート結果1
|
質問項目 |
平均値 |
|
学生とのコミュニケーションは重要だと思う(1~5) |
4.27 |
|
コミュニケーションを取るための工夫をしている(1~5) |
3.73 |
表3.2 教員アンケート結果2
|
具体的な工夫の内容 |
回答数 |
|
学生に対し問いかけをする |
10 |
|
学生に発表させる |
4 |
|
学生の席をまわる |
4 |
|
映像・Webなどのメディアを利用する |
5 |
*その他の回答
・感想カード
・SFS(履修支援システム)の利用
・質問用紙への記入
・簡単な課題提出
・世間話をする
(3) 授業中の発言の量
授業中の学生からの平均的な発言回数と,発言回数に対してどう感じているか,多い・少ないの結果を表3.3,3.4 に示す.発言回数と印象との相関は弱く,その理由としては,回答した教師の担当授業ごとに受講者数が違うことや,100 人以上の授業の場合や,学生からの発言以外の方法で学生の意見を集めているため,発言がほとんどなくてもそれが適切であると答えたためだと考えられる.
表3.3 授業中の平均的な発言回数
|
発言回数 |
回答数 |
|
7回以上 |
4 |
|
4~7回 |
0 |
|
1~3回 |
6 |
|
ほとんどない |
5 |
表3.4 発言回数に対する印象
|
発言数の印象 |
回答数 |
|
非常に多い |
0 |
|
やや多い |
0 |
|
適切 |
4 |
|
やや少ない |
5 |
|
非常に少ない |
5 |
|
無回答 |
1 |
(5) IT による授業支援への意識
ネットワークを利用したシステムによって学生からの反応を集計し,教室内での理解度の共有をはかる,というようなシステムについて,使ってみたいかどうか,について答えてもらった.回答は 1 (まったく不要) から 5 (ぜひ使ってみたい) までそれぞれ分かれる傾向となった.
自由記述の中で意見が集中したのは,匿名性についてであった.匿名性を挟むようなシステムであれば,授業の場にはまったく必要ないという意見が多くあがった.また,アンケートに回答した教師の多くが,受講者が100 人以上の授業を担当していたことから,リアルタイムに学生全体の反応がわかるような機能なら使いたい,という意見もあった.
他にも,十分にインタラクティブなスピードならば使ってみたい,授業の時間外なら使ってみたい,PC の画面を使わない方法なら使ってみたい,という意見や,どのようなものであっても,学生との直接のやり取り以上のものは不要である.という意見など,教師によって考え方はさまざまであった.
3.2.2 授業調査
ロボットTAの機能,利用方法の検討のために,授業中の教師と学生の行動の調査を行なった.
(1) 調査手法
調査の方法には,タイムサンプリング法をもちいた.これは,一定時間が経過した時点での対象の行動を記録し,その生起数を調べる方法である.これによって,授業中の教師と学生の行動を量的に調査した.
今回は調査のため,2つの別の授業について,90分間の授業の様子を,教室の,学生側の後方から撮影した.そして,撮影したビデオから,30秒ごとの,教師の行動を観察した.学生についても,授業を受けている学生のうち一人を選び,教師と同様に90分間の行動を観察した.調査した2種類の授業は,Aが演習を交えたプログラミングに関する講義であり,Bがコンピュータの技術に関する講義形式の授業である.
(2) 調査の結果
調査の結果は図3.1の通りである.

図3.1.調査の結果
ここで記録した行動の種類は以下のとおりである.
<教師>
・[立って話す] 話す(立ち・視線前),(立ち・視線下),(立ち・視線スライド/板書),(板書しながら)
・[座って話す] 話す(座り・視線前),(座り・視線下),(PC操作しながら)
・[学生と対話する] 質問する(全員に), 巡回する, 会話する
・[それ以外] PC操作する, 黙って板書する, 何もしない(その他)
<学生>
・[教師の話を聞く] 教師を見る, スライドを見る, 板書を見る
・[作業をする] 手元を見る
・[教師と対話する] 教師と会話する, 手を挙げる, 笑う(教師の話に対して)
・[それ以外] 関係のない方向を見る
(3) 調査結果からの考察
調査の結果から,どちらの授業でも,授業時間中の教師の行動の4分の3以上が,口頭または板書に寄る教師から学生への知識の伝授であることが分かる.学生一人の行動の内訳においては,教師と学生が相互にコミュニケーションを行なっている時間は全体の1割以下であり,また,学生から自発的に授業に対する質問が起こることも無かった.
今回は,多くの授業の中から2つだけを選び調査しただけなので,この調査から大学の授業の実態を述べることはできないが,実際の授業の一例として,その後のロボットTAの研究の参考となった.また,この調査法は,実際に授業支援の実証実験を行なう際に,その効果を検証するための客観的な評価方法として,利用できると考える.ロボットTAなどの授業支援システムを運用した場合とそうでない場合で,アンケート,インタビューなどの主観的な評価と,客観的な評価結果の変化を比較し,授業の質的な評価基準として用いることができるだろう.
3.3 ロボットTA実験
IP
RobotPhone を用いて実験を行ない,ロボットが授業を受ける学生に与える影響を調査した.
3.3.1 実験の手法
 実験の手法と使用したロボットについて説明する.
実験の手法と使用したロボットについて説明する.
(1) IP RobotPhone
IP
RobotPhone(以下IPRP)は,ロボット型のIPフォンであり,ネットワーク越しに,離れた相手と会話したり,相手側のIPRPと動きを同期したりすることができる.外観はクマのぬいぐるみの形をしており,スピーカーとマイクの他,両腕の付け根と首の部分に180°×2軸の関節がついていて,頭と両腕を動かすことができる.関節は角度センサーにもなっており,現在の頭と腕の角度を取得できる(図3.2).これによって,離れた場所のIPRPとの間で,音声のやりとりや動きの同期を行なうことができる.また,SDKを用いて,プログラムによって動きを制御することもできる.
図3.2 IP RobotPhone
(2) 実験方法
約6分の長さの2
ビデオの再生中,ロボットは話の切れ目にあわせて,うなずきの動作を行なわせた.また,ビデオの再生中に,話者が冗談を言ったタイミングで首と両腕をおおきく3回振る(“笑い”を想定)動き一度行なわせ,視線を約1秒間ビデオから被験者の方に移す動作を二度行なわせた.
アンケートでは,実験で用いたロボットに対して,ロボット自身の感情やロボットに対しての愛着を感じたか,ロボットがビデオの内容に合わせて動くことでビデオが見やすかったかどうかなどについて質問した.
授業に関する質問用紙の記入は,ロボットを使うことで,授業の中の特定の内容に学生の意識を向けられるかを検証するためと,普段の授業と同じような意識で実験に参加してもらうために行なった.
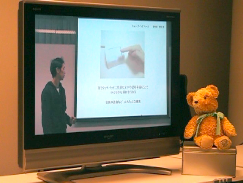
図3.3.実験の様子
3.3.2 実験の結果
実験後のアンケート集計の結果は以下のようになった.
表3.5.アンケート結果
|
質問項目(5~1) |
平均値 |
|
感情を持っていると感じたか |
2.73 |
|
意志を持っていると感じたか |
2.64 |
|
愛着を感じたか |
3.91 |
|
邪魔に感じなかったか |
2.91 |
|
ロボットがいることで理解の助けになったか |
2.63 |
3.3.3 実験の考察
「ロボットに愛着が持てたか」という項目だけは少し高めの結果だったが,あとはほぼ中間かやや否定気味の結果であった.愛着が持てたという回答が高かったという結果については,ロボットがぬいぐるみの形状をしていたためだと考えられる.
また,ロボットを用いた場合とそうでない場合でそれぞれ,スライド発表の内容についての感想,疑問等について記入してもらったが,感想の分量,対象となった話題等については,ロボットの有無による差は特に見られなかった.
これらの結果を得た原因としては,実験の方法と,ロボットの動き,形状等の理由が考えられる.今回の実験では,ロボットはビデオの中の発表者の話すタイミングに合わせて動かしたが,発表者とロボット,学生とロボットとのあいだでの相互作用としてのアクションは無かった.そのため,ただロボットが動いている,と感じる以上の印象を与えることができなかったと考えられる.
今回使用したロボットは,両腕と頭の付け根の3カ所しか動かすことができず,細かい動きを表現することができなかった.このことも評価が低かった原因と考えられる.
3.4 へぇボタン実験
授業中に学生からの質問や意見,授業への反応を集計し可視化するツールとして,へぇボタンの実装をおこない,実際の授業で使用した.
3.4.1 へぇボタンの目的
授業中のコミュニケーション促進の試みとしては,チャットの利用などがあげられる.チャットを利用すると,授業中に匿名で発言を行なうことができるために,学生からの意見や質問を集めやすくなると言う効果がある.しかし,授業と並行して行なわれるチャットでは,
・教師がチャットに参加できない
・授業の内容とチャットでの会話内容の両方を追わなければいけないために学生の負担が増加する
等の問題もある.これらの問題を解決しつつ,学生からの授業への反応を収集するためのツールとして,へぇボタンを作成した.
3.4.2 へぇボタンの機能
へぇボタンは以下のような機能を持つ.
(1) 理解の共有
授業中,学生は授業の内容に対して感心したとき,疑問を感じたときなどにボタンを押し,反応を示すことができる(図3.5).学生から得た反応は,一旦集計され,教師と学生の双方に向けて提示される.これにより,教師からも学生からも,教室内にいる学生全体の理解度を共有することが可能である (図3.6).
(2) 教師とのインタラクション
教師は,へぇボタンを利用して,授業中に簡単なアンケートなどをとることも可能である.また,授業に対する学生の反応に応じて,臨機応変に授業の進行を変えていくという授業の進め方も可能である.
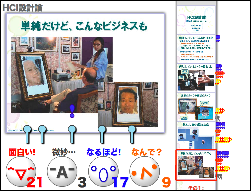
図3.1.へぇボタン画面(教室側)

図3.2.ボタンを押した際のアクション 図3.6.へぇボタン画面(学生側)
3.4.3 へぇボタンの特徴
へぇボタンの特徴としては,チャットと同様に匿名性があること,入力がワンクリックででき,非常に簡単であること,学生から収集した入力情報が,“へぇ”と“えー”の 2 種類の入力の集計として,教室のスクリーン上で即座に確認できることが挙げられる.匿名で入力できることから,チャットと同じように,いたずらで必要以上にボタンを押すなどの無責任な行為が起こる可能性があるが,学生の負担が増加するという問題に対しては,入力と確認が容易であることから,へぇボタンの方が有利であるといえる.また,入力内容が即座にスクリーンに反映されることから,学生の参加意欲の向上の効果と,発言をしやすい教室の雰囲気作りに有効であると考える.
3.4.4 実証実験
(1) 実験の目的
試作したへぇボタンの効果を検証するために,実際の授業で使用し,学生がどのように使用したかを記録した.また,使用した学生に対してアンケート,インタビューをおこない,へぇボタンの評価をおこない,これによって,へぇボタンが実際に,授業に対する理解や興味の共有に役立っているか,教室の雰囲気作りに効果があるかを検証した.
(2) 実験の概要
実験は,2007年度秋学期開講の,HCI設計論の授業の中で行なった.予備実験として1回使用したあと,機能の調整を行ない,その後計3回使用した.3回目の実験のあとに,学生に対してアンケートを実施した.また,アプリケーションを使用した学生の一人に対してインタビュー調査を行なった.
教室内には,図3.7のように機器を配置して実験を行なった.実験に使用した教室は,教室正面に2面,教室側面に2面,教室後方に1面の計5面のスクリーンがある.このうち,正面の2面に,教師が操作するスライドと,へぇボタンの教室側画面を1面ずつ表示し,加えて後方のスクリーンにも,教師とTAの確認用に,教室側の画面を常に表示した.教室内は,無線LANによって常にインターネットに接続することができる.学生には,各自の PC から,学生用のアプリケーションを起動し,授業を受けてもらった.授業の受講者は16人 (うち聴講1人) で,そのうち6人から8人がへぇボタンを使用した.
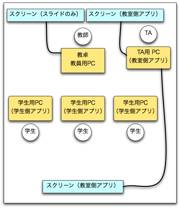
図3.7.教室内の機器の配置
(3) 実験の結果
実験中のアプリケーションのトラブルなどにより,一部正確なボタンの入力数が記録できていないが,入力数は次第に少なくなる傾向が見られた.全体をとおして最も多く押されたのは“なるほど!”ボタンで,逆に一番押されなかったのは“微妙...”ボタンであった.アンケートの項目と結果を表3.6に示す.回答者は,実験に参加してへぇボタンを使用した,政策・メディア研究科に所属する23歳から24歳の学生男女7名である.また,そのうちの学生一人に対して行なったインタビューでは,表3.7のような回答を得た.
表3.1.アンケート結果
|
質問項目(5~1) |
平均値 |
|
へぇボタンの画面を見たか |
3.29 |
|
他の学生の理解,興味がわかったか |
3.14 |
|
授業を聞きながら使うことができたか |
3.14 |
|
それぞれのボタンの表記は適切か |
3.50 |
表3.2.インタビュー結果
|
質問項目 |
回答 |
|
「なるほど!」を押した理由 |
新しい知識を得たと感じた時 |
|
「面白い!」を押した理由 |
興味を引かれる内容だったとき DVD等のコンテンツを見て |
|
「微妙…」を押した理由 |
“悪い例”に対する同意として |
|
「なんで?」を押した理由 |
ほとんど押さなかった あとで聞いた方がいいと思ったから |
|
システムの機能について |
他のボタンは押した時点で終わりだが,「なんで?」のボタンは疑問を解決するプロセスが入るため,フィードバックの有無によって,押すモチベーションが変わるのではないか? |
(4) 実験の考察
入力できる内容を数種類に限定する試みについては,当初は学生の反応の傾向を即座に数値化できることを期待していたが,実験結果から,ボタンの表記の仕方や押す際のルール付けが曖昧だと,授業の内容によって学生が押した意図が変わってしまい,学生の反応の意図が正確に反映されないことがわかった.アプリケーションを継続して使用させるためには,学生が入力した内容に対して,途中で振り返って議論を行なう,または入力数に応じて授業の内容を変更するなどのフィードバックを返すことが不可欠である.また,具体的な発言をすることができないために,チャットのように,このアプリケーション単体で会話のツールとして使用することは不可能である.
3.4.5 機能の拡張とロボットTAとの連携
実験から,へぇボタンの問題点として,押した内容や数に対する教師(またはTA)からのフィードバックのルール等を決めて使用する必要があることがわかった.この点を改良し,学生の授業に関する反応をリアルタイムで収集することができれば,授業の進行の仕方や,学生とのコミュニケーションのきっかけとして利用できると考える.また,ロボットTAと連携させ,ロボットが学生の理解の度合いに応じて,授業の進行を調整するよう教師に呼びかける,などの相互作用的な働きを行なわせることができると考えられる.
3.5 まとめ
ロボットTAの実現に向け,ロボットTAに期待される役割を探るための調査,授業に見立てたプレゼンテーションとロボットを組み合わせる効果の検証,授業中に,学生とリアルタイムに理解や興味の度合いを共有するためのツールの試作とその実証実験などを行なってきた.
ロボット,授業支援ともに基礎的な技術,実績の無い状態からの研究だったために,新規性,有用性を示す成果を得るには至らなかったが,今回行なった授業調査や実験で得られた結果から,ロボット,ITを用いた新しい授業支援の研究とその実現につながることを期待する.
4. ジェスチャー研究
~動きの中のメッセージ: 低自由度のロボットのジェスチャーを人はどう受け止めるか?
Jamy
Li
4.1 概要
個人向けのロボットとして,これまでさまざまなトイロボット,動物型ロボット,掃除機型ロボットなどが提案されてきたが,実際にそうしたロボットを利用している人々はまだ限られている.今後,パーソナルロボットがより普及するためには,人間がロボットを社会性存在とみなせるよう,ロボットをデザインすることが必要であると考える.
動きは生物であるかどうかを見分ける手がかりとして利用されるが[1],ロボットが社会的インタラクションの対象であることを表現するためにどのような動作をすればよいのかはまだ明らかになっていない.
そこで本研究では,ジェスチャーを見た時,文脈情報の提示や動作の複雑性がそのジェスチャーの理解にどのような影響を及ぼすかを調べた.
感情に重点を置く先行研究[例えば2]とは異なり,本研究ではメッセージと感情の両方の伝達について調べた.本研究の結果は社会的ロボットのデザインに重要な示唆を与えると共に,人間のジェスチャー知覚を技術的環境において応用する手助けとなると考えられる.
4.2. 方法
低自由度(頭部2自由度,左右の上腕各2自由度)のクマのぬいぐるみ型ロボット(IP RobotPhone,
http://www.iwaya.co.jp/Files/phone-j.html) [3]を用いて,このロボットのジェスチャーを人がどう受け止めるかを調べる実験を行なった.
まず,ステップ1として,4名の協力者(学生,男女2名ずつ)に,12種類のシナリオ (例:「あなたはクマの頭をなでました」) を見せ,それぞれのシナリオに適したジェスチャーを作成し,そのジェスチャーの意味を記述するように求めた.
続くステップ2では,ステップ1で得た48のジェスチャー(12シナリオ×4協力者)を,提示方法と文脈の2要因を変化させて12名の被験者に提示した.提示方法は,ジェスチャーをコンピュータ画面上のアバターで見るアバター条件と,クマロボットのジェスチャーを撮影したビデオで見るビデオ条件の2条件であった(図4-1).文脈は,ジェスチャーを見る前に,そのジェスチャーが作られた際のシナリオを提示する条件(文脈あり)と提示しない条件(文脈なし)の2条件であった.また,ジェスチャーの複雑さを頭の動きの回数,腕の動きの回数,二人の評価者による複雑さの主観的評価 (inter-correlation=.78) によって定義し,これらの効果も調べた.
12名の被験者は,それぞれのジェスチャーについて,好ましさと生き物らしさを評定し,ジェスチャーが表現していると思われるメッセージ (例:かまって!)と感情(例:幸せ)を選択肢の中から選択した.また,ジェスチャーの好ましさと生き物らしさについて7段階で評定を行なった.
提示条件,文脈条件,ジェスチャーの複雑性を独立変数とし,被験者の評定値(好ましさ,生き物らしさについて7段階評定),及び,メッセージと感情の解釈の正確さ(ジェスチャー製作者の意図との一致度および他の評価者との解釈の一致度)を従属変数として分析を行なった.

図4-1 アバター条件(左)とビデオ条件(右)のイメージ
4.3 結果
まず,文脈知識は評価者にとって有利であることが示された.分散分析の結果,文脈あり条件ではメッセージ解釈の精度は有意に高かった(文脈なし:20%,
文脈あり: 56%に向上,
F(1,11) = 93.8, p<.001).
ビデオ条件では,文脈は好ましさ(F(1,11) = 4.65, p=.054),生き物らしさ(F(1,11)=5.48, p=.039)を高める効果が見られた.ただし,この効果は大きなものではなかった(7段階スケールで中間程度).
複雑性については,より複雑なジェスチャーほど好ましさ,生き物らしさ,そしてメッセージの理解度を向上させる効果が見られた(腕の動きが多いほどジェスチャー製作者-評価者間の一致度が34.8%から43.8%に向上したF(1,11)=6.0,
p=.032)).一方,感情の理解度は動きの複雑さが増すと低下した(頭の動きが多くなると,感情理解の精度が36% から29%に低下した F(1,11)=413, p<.001).このことから,メッセージと感情情報の処理は異なることが示唆された.
4.4 まとめ
本研究の発見をまとめると以下の通りとなる.
1.シンプルなジェスチャーがよいとは限らない.本実験においては,複雑なジェスチャーはより好まれ,より生き物らしいと知覚され,メッセージがより正確に理解された.
2.文脈知識を提示することによってメッセージがより正確に伝わった.
3.メッセージの理解と感情の理解は異なっており,ジェスチャーによっては意味を伝えやすいものとそうでないものがある.
これらの結果はロボットのジェスチャーデザインのための有益な示唆を提供すると考えられる.
[参考文献]
1. Opfer, J.
Identifying living and sentient kinds from dynamic information: the case of
goal-directed versus aimless autonomous movement in conceptual change.
Cognition, 86, 97-122, 2002.
2. Marui, N. and
Matsumaru, T. Emotional Motion of Human-friendly Robot: Emotional Expression
with Bodily Movement as the Motion Media. 第23回日本ロボット学会学術講演会, 2005.
3. Sekiguchi, D.,
Inami, M. and Tachi, S., RobotPHONE: RUI for Interpersonal Communication.
CHI2001: Extended Abstracts, pp. 277-278, 2001.
5. おわりに
今回のロボットTAの研究では,用いたロボットがやや小型で,身体動作の範囲が限られていたため,直接的に,ロボット自体がTAとして,授業の支援に役立つというポジティブな評価は残念ながら得られなかったが,ロボットTAをどういう形で授業に持ち込めば良いのか,その際のジェスチャーや声質に関する基礎的検討結果は得ることができた.また,従来,授業にチャットを持ち込む研究事例は比較的多いが,へぇボタンを持ち込むシステムを試作し,簡単な評価実験を行なうことができた.
今後は,さらに本格的なロボットの導入により,より直接的にロボットTAを授業支援に持ち込むことの可能性の検討を行ないたい.