2008�N�x�w�p�𗬎x������
�u�����O�ł̃C���^�[���V�b�v�A�t�B�[���h���[�N�Ȗڎx���v��
�u��i�I�ȏ��ʐM�E�ړ��̃V�X�e���̓����ɂ��
�n���s�s�̃R�~���j�e�B�������v
�\����\�ҁF����E���f�B�A�����ȁ@��O�@�w
�P�D�{�����̊T�v�Ɩ{���ɂ���
�n���s�s�ł́C�l�������ɔ����ߑa����s�����������ŁC�n�惂�r���e�B��R�~���j�e�B�̂Ȃ���̈ێ��ɂ��āC�傫�ȉۑ������Ă���ꏊ�������D�܂��C����҂�q���ɂ��āC���S�ň��S�ȊO�o�x�����s�����Ƃ����߂��Ă���C���̎����͉Ƒ���R�~���j�e�B�̕��S�y���ɂ��Ȃ���D�]���C�����̒n��ۑ�ɑ��āC���r���e�B�C�R�~���j�e�B�C���ʐM���̊ϓ_����ʂɎЉ�����⒲�������̕��@�_�J�����i�߂��Ă����D�{�����ł́C�����̐��ʂ�m�E�n�E��Z�������C�Ő�[�̏��V�X�e���y�шړ��̂Ő�����ړ����x�����邱�Ƃ�ʂ��C�n�拤���̂ł̂Ȃ��苭����s���R�X�g�E�����ׂ̍팸�ɂǂ̂悤�Ȍ��ʂ�������̂������ؓI�Ɏ������Ƃ�ړI�Ƃ���D��̓I�ɂ́C�{�錧�I���s��ΏۂƂ��āC�Ő�[�̏��ʐM�@�����������^�d�C�����Ԃ����p���C�q�����炨�N���܂ł̈��S�E���S�ȊO�o�x���Ɋւ�����؎������s���Ƌ��ɁC���S�s�X�n�������Ɋւ�����ʂ�������D
��L�ɂ����āC���x�������w�p�𗬎x���������I���s�ɂ����郂�r���e�B�����V�X�e���̊J���ɂ�����w���̊����i��ɗ���j�ɏ[�������Ē������D����Ė{���ł́C�I���s�ɂ����郂�r���e�B�����V�X�e���̊J���𒆐S�ɐ��ʂ����D
2�D�I���s�ɂ����銈���̊T�v
�@���̏͂ł́C�Q�O�O�W�N�T���`�P�O���Ɏ��{�����I���s�ɂ����銈���ɂ��ĊT�v���������D
�@�I���s�ɂ����銈���ł́C���N�T������P�O���ɂ����āC�u�בq�}�C���p�[�N�v�Ւn���t�B�[���h�Ƃ��āC�ȉ��̎菇�Ō�����i�߂��D
�@���ʐM���̍\�z�i�T���`�U���j
�u�בq�}�C���p�[�N�v�S��ɖ����k�`�m�ݔ���ݒu���C�~�n���̂�����ړ��́C�l������Ղɐڑ��ł�������\�z�����D
�A�j�[�Y�����i�T�`�U���j
�I���s��������̈ړ����ɕ�����ۑ�����C���؎����̃V�i���I��n��̌���ɑ����`�Ő�������D�܂����^�d�C�����Ԃ̃f�U�C�����f�����Z���ɕ]�����Ă��炢�C�ԗ��̎Љ��e���ɂ��Č��������D
�B���r���e�B�����V�X�e���̍\�z�i�V�����{�`�P�O����{�j
������\�҂炪�J�����������^�]�����Ԃ��u�בq�}�C���p�[�N�v�ŃI���f�}���h�^�̎����^�]���s�������V�X�e�����\�z�����D
�C���j�^�[�����i�P�O���j
�I���s�������j�^�[�Ƃ��āC�I���f�}���h�^�����^�]�����Ԃ𗘗p�����g���b�v��ݒ肵�C�בq�}�C���p�[�N���������Ȓ��Ɍ����Ă����[���v���C���������{�����D
3�D�I���f�}���h�^�����^�]�V�X�e���̍\�z
���̏͂ł́C�{�����ɂĊ������s�����I���f�}���h�^�����^�]�V�X�e���̊J���ɂ��ĕ���D���̊����͑�Q�͂ɂ�����B�ɊY��������̂���D�ȉ��̊e�߂ł́C�����̊T�v�C�V�X�e���\���C�������ʂ�������C�Ō�Ƀ��j�^�[�����̗l�q�����D
3.1�@�����̊T�v
�����Ԃ̎����^�]�͌�ʎ��̂̌���������ׁC�G�l���M�[����̌y���Ȃǂ���ȖړI�Ƃ��āC�l�X�Ȍ���������Ă���D�\���ɂ����āC�����̗��p�҂�C�ӂ̏ꏊ�ɓ����Ɉړ������鎩���^�]�V�X�e�����l�����ꍇ�C���p�҂��X�̎ԗ��Ɍʂɔz�ԗv�����s���ƁC�^�p�����ԗ���������C���p�҂̔z�ԗv���ɍœK�Ȏԗ����z�Ԃ���Ȃ������肵�āC�V�X�e���S�̂�������Ȃ��̂ɂȂ��Ă��܂��D
�{�����́C���p�҂̗v���ɉ������}�Ԃ◘�p��̉Ȃǂ��������C�����̗��p�҂������I�ɗ��p�ł��鎩���^�]�V�X�e���̍\�z��ڎw���Ă���D�{�����ł́C�V�X�e���̍\�z�ɍۂ��C�V�X�e�����u�z�ԗ\��v�C�u�z�ԊǗ��v�C�u�ԗ�����v�̎O�̍\���v�f�ɕ����C���ꂼ������������ĉ^�p���邱�ƂŌ����I�ȉ^�p�����������D�J�������V�X�e���́C�{�錧�I���s�̍בq�}�C���p�[�N�ɂĎ��Ԏ������s�����D�}�P�͂��̎������i�ł���D

�}�P�@�����^�]���i
3.2�@�V�X�e���\��
���̐߂ł́C�{�����ŊJ�����������^�]�V�X�e���ɂ��Đ�������D�ȉ��̊e�߂ł́C�V�X�e���̊T�v�ƃV�X�e���̍\���v�f�ł����z�ԗ\��C�z�ԊǗ��C�ԗ������ɂ��Đ�������D
3.2.1�@�V�X�e���̊T�v
���̍��ł́C�����^�]�V�X�e���̊T�v�ɂ��Đ�������D
�{�����ŊJ�����������^�]�V�X�e���́C�u�z�ԗ\��v�C�u�z�ԊǗ��v�C�u�ԗ�����v�̎O�̍\���v�f����Ȃ���̂Ƃ����D�}�Q�ɃV�X�e���̍\���}�������D
�u�z�ԗ\��v�́C�����^�]�ԗ��̔z�Ԃ̗\��葱���Ɋւ���v�f�ł���C��Ɏ����^�]�V�X�e���ƃV�X�e�����p�҂Ƃ̃C���^�[�t�F�[�X�ƂȂ�D
�u�z�ԊǗ��v�́C�u�z�ԗ\��v�Ɓu�ԗ�����v�̋��n���I�ȗv�f�ł���C�u�z�ԗ\��v����̗\��v���̎t���ƁC�ԗ��ւ̗\��v���̊���U����s���D����U��̍ۂɂ́C�e�ԗ��Ɋ���U��̉ۂ�C�ړI�n�܂ł̏��v���ԂȂǂ̖₢���킹���s���C�œK�Ȏԗ�����������D�܂��C�\��̊Ď���ԗ��̏�ԊĎ��ȂǁC�����^�]�V�X�e���ƃV�X�e���Ǘ��҂Ƃ̃C���^�[�t�F�[�X�ɂ��Ȃ�D
�u�ԗ�����v�́C�ԗ��̉^�������ڕW�O���쐬�C�ڕW�O����̏�Q�����o�Ɋւ���v�f�ł���D�܂��C�����^�]�V�X�e���Ǝԗ��ɓ��悵�Ă���V�X�e�����p�҂Ƃ̃C���^�[�t�F�[�X�ɂ��Ȃ��Ă���D
��L�̍\���v�f�́C�ʂ̃R���s���[�^��Ŏ��s����C����LAN�ł��݂��ɒʐM���C���ꂼ��ɕK�v�ȏ��������������D�܂��C�O�̍\���v�f�̒��ł��C�u�ԗ�����v�ɑ����̋@�\���������Ă���D����́C�u�ԗ��Ǘ��v�̃R���s���[�^�̕��y���̑��ɁC�ʐM�s�ǎ��ɂ����Ă��C�u�ԗ�����v�̋@�\�����ő��s���p���ł���悤�ɂ��邽�߂ł���D
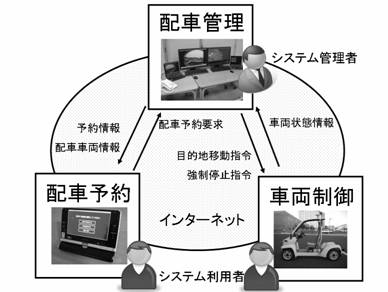
�}�Q�@�V�X�e���\���}
3.2.2�@�z�ԗ\��
���̍��ł́C�z�ԗ\��ɂ��Đ�������D�z�ԗ\��̋@�\�͎�ɗ��p�҂��p����ԗ��̗\����t������̂ł���D
���p�҂͐}�R�̂悤�Ȕz�ԗ\��[����p���āC�}�ԏꏊ�ƍs�������ꏊ����͂���D���͂̍ہC���p�҂͒n�}�ɂ����͂ƁC���炩���ߓo�^���ꂽ�ꏊ�̃V���[�g�J�b�g�ɂ����͂��\�Ȃ��̂Ƃ����D�}�S�͒n�}�ɂ��\���ʂł���D�n�}�ɂ����͂ł́C�\���̒n�}��p���C�^�b�`�p�l���ŖړI�̏ꏊ��G��邱�Ƃœ��͂��s����D�܂����͂����₷���悤�ɁC�n�}���g�傷�邱�Ƃ��ł��C���ׂ��ȓ��͂��s����D�V���[�g�J�b�g�ɂ����͂ł́C�悭�g���ꏊ��\�ߓo�^���Ă���C�{�^����ŖړI�̏ꏊ����͂��邱�Ƃ��ł���D���p�҂̌}�ԏꏊ�C�ړI�n�i�s�������ꏊ�j�̌����C���̏�C�z�ԊǗ��R���s���[�^�ɓ`������C���̌�C�z�ԊǗ��R���s���[�^����C�ԗ��̔ԍ��ƁC�}�Ԓn�_�ւ̎ԗ��̗\�z���B���Ԃ���M���C�[����ɕ\�������D

�}�R�@�z�ԗ\��[��

�}�S�@�n�}�ɂ��\����
3.2.3�@�z�ԊǗ�
���̍��ł́C�z�ԊǗ��ɂ��Đ�������D�z�ԊǗ��̋@�\�͎�ɗ\��̊Ǘ��Ǝԗ��̊Ď��ł���D
�z�ԊǗ��R���s���[�^�̗l�q��}�T�Ɏ����D�z�ԊǗ��R���s���[�^�́C�V�X�e�����p�҂���̗\��v�����ꊇ���Ďt���C�\��v�����ꎞ�I�Ƀo�b�t�@�[�L���Ɋi�[����D��ԏ�Ԃ̎ԗ�������C�i�[�����z�ԗv����撅���Ŋ���U��D���̍ہC�����̋�ԏ�Ԃ̎ԗ�������ꍇ�C�e�ԗ��ɑ��Ĕz�ԗv���̌}����܂ł̑��s������₢���킹�C�ł����������ł���ԗ��ɔz�ԗv��������U�邱�ƂŁC�����I�Ȕz�Ԃ��s���Ă���D�܂��C�z�ԊǗ��R���s���[�^�͎����^�]�V�X�e���ƃV�X�e���Ǘ��҂Ƃ̃C���^�[�t�F�[�X�����˂Ă���D�z�ԊǗ���ʂł́C���ׂĂ̎ԗ��̈ʒu��������n�}�Ƀ}�b�s���O����C�ԑ��Ȃǂ̏�ԂȂǂ����l�ŗe�ՂɊm�F���邱�Ƃ��ł��C�܂��C�\����Ď����邱�Ƃ��ł���D�����C�����^�]�ԗ��Ȃǂɉ��炩�̖�肪����C�V�X�e���Ǘ��҂͎ԗ��Ɋ���U��ꂽ�z�ԗ\�������������C��肪����ԗ���������~������C�f�|�ɉ��邱�Ƃ��ł���D

�}�T�@�z�ԊǗ��R���s���[�^�̗l�q
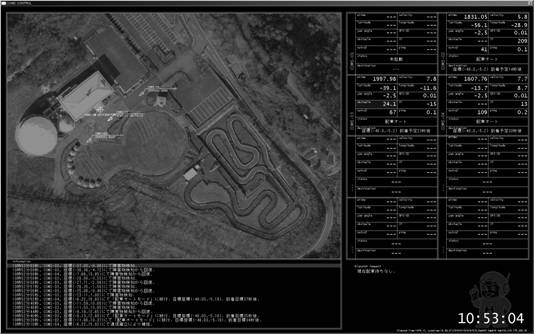
�}�U�@�z�ԊǗ����
3.2.4�@�ԗ�����
���̍��ł́C�ԗ�����ɂ��Đ�������D�ԗ�����̋@�\�͎�ɖړI�n�܂ł̖ڕW�O���쐬�Ǝ����^�]����C��Q���Փ˖h�~�����ł���D
�}�V�Ɏ����^�]�ɗp����ԗ��������D�����^�]�ԗ��̃V�X�e���\���͐}�W�̂Ƃ���ł���D�u�z�ԊǗ��v���u�z�ԗ\��v����\����t�����ہC�u�z�ԊǗ��v�͊e�ԗ��ɑ��ė\��̊���U��̉ۂ̖₢���킹���s���D�₢���킹�����ԗ��́C���Ԃ����̗\��ʼn^�p���łȂ���C�₢���킹�����\��̌}�Ԑ�܂ł̑��s�������v�Z����D���s�����̌v�Z�́C�ڕW�O�������̏�����p���C��Έʒu���W�ŋL�q���ꂽ�ڕW�O�������C�O������ώZ���邱�Ƃŋ��߂�D�v�Z��C���߂����s�����Ɗ���U��\�̃��b�Z�[�W���u�z�ԊǗ��v�ɕԐM����D���������ŁC�ԗ����ł������}�Ԑ�ɓ����ł���ꍇ�́C�u�z�ԊǗ��v����\��̊���U�肪�s���C�ԗ��͌}�Ԑ�܂ł̎����^�]���J�n����D�ԗ��́C�z�ԊǗ��R���s���[�^���犄��U��ꂽ�z�ԗv��������ɁC�}�Ԑ�܂ł̉ƍs����܂ł̑��Ԃ������^�]����ɂčs���D�ȉ��̍��ł́C�ڕW�O�������Ǝ����^�]����ɂ��ďq�ׂ�D

�}�V�@�����^�]�ԗ�
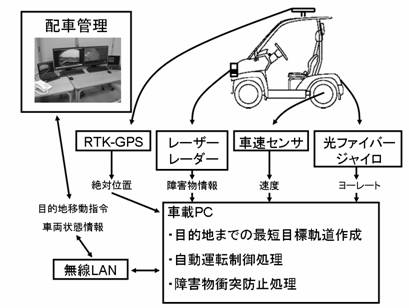
�}�W�@�����^�]�ԗ��\���}
(1)�ڕW�O������
�@���̍��͖ړI�n�܂ł̖ڕW�O�������A���S���Y���ɂ��Đ�������D�ԗ��͐�Έʒu���ŋL�q���ꂽ�ڕW�O�����Ǝԗ��̐�Έʒu��p���Ď����^�]������s���D�{�����ŊJ�����������^�]�V�X�e���́C�\���̔C�ӂ̏ꏊ�Ɏԗ����ړ�������K�v�����邽�߁C�ڕW�O���͈ړ�����ꏊ�ɉ����ēK�X�ω�������K�v������D�{�����̖ڕW�O�������A���S���Y���ł́C�����̖ڕW�O���̃Z�O�����g���Ȃ����킹�邱�ƂŁC�ړ�����ꏊ�ɉ����ēK�X�ω������邱�Ƃ��ł���D�ԗ��͗\�߁C�����̖ڕW�O���̃Z�O�����g�ɂƁC�Z�O�����g���m�̐ڑ��̑Ή��W���������Z�O�����g�Ή��\�����D�ԗ��͂܂����Ԃ̌��݈ʒu�ƖړI�n����ł��߂����W�����Z�O�����g�����ꂼ�ꌟ������D���̌�C�����������Z�O�����g���Ȃ��o�H���C�Z�O�����g�Ή��\��p���Č������s���āC�ŒZ�Ō��Ԍo�H���o���D���̍ہC�Z�O�����g�Ԃ̑��s�����̌v�Z�́C��Έʒu�ŋL�q���ꂽ�ڕW�O�����̐ώZ�ōs���D�ȏ�ŋ��߂��ŒZ�o�H�ł���ڕW�O������p���āC���B���Ԃ��v�Z���C�z�ԊǗ��R���s���[�^�ւ̉������s���D�܂��C�z�ԊǗ��R���s���[�^����̑��s�w�����o���ꍇ�́C���̖ڕW�O����p���Ď����^�]���s���D
(2)�����^�]����
���̍��ł́C�ԗ��̎����^�]����ɂ��Đ�������D
�ԗ��̎����^�]����́C�ԗ���Ԑ���C���ǐ���C���x����ɕ����邱�Ƃ��ł���D
�{�����ŊJ�����������^�]�V�X�e���̎ԗ���Ԑ���́CRTK-GPS�ƎԍڃZ���T�ɂ���Đ���ԗ��̏�ԗʂ��v�����C�ԗ������V�X�e���Ƃ����J���}���t�B���^�ƁC�f�b�h���R�j���O��p���Đ�Έʒu�𐄒肷���@��p���Ă���D
�{�����ŊJ�����������^�]�V�X�e���̑��ǐ���́C�ԗ��ƖڕW�Ԑ��̑��Έʒu����C�����������[���ɂ��邽�߂̕K�v�ȃ��[���[�g���Z�o���C���̃��[���[�g�����邽�߂̑��NJp����сC���䎞�̖ڕW�Ԑ��ɑ���덷����ڕW���NJp���Z�o����A���S���Y����p����.
�{�����ŊJ�����������^�]�V�X�e���̑��x����́C�\�ߗp�ӂ����ڕW�O�����ɑΉ������ڕW���x�����g���C���ꂼ��̏ꏊ�ł̖ڕW���x��ݒ肵�Ă���D�ڕW���x���ɑ��Ďԗ��̑��x�𐧌䂷��ہC���z�H�ւ̑Ή��̂��߁C���z�����t�B�[�h�t�H���[�h���͂ɗp�����D���z���́C���s���̎ԗ��ʒu���̍��x�̕ω����琄�肵�Ă���D��̓I�Ȍv�Z���@�͈ȉ��̒ʂ�ł���D���鑖�s�H�̋����ƍ����̊W���ȒP�Ȉꎟ�������Ƃ���Ɖ��L�̐����̂悤�ɂȂ�D
![]()
z�����x�Cx�͌X�������߂�n�_���[���Ƃ������s�����ł���D���ɁC�X��a�����߂�ɂ́C������x�Ԋu��������n����Έʒu����p���C�X�������߂�n�_����̑��s�����ƁC���x����p���čŏ����@�ɂ����`�ߎ����s���D
�����ŋ��߂��X��a���t�B�[�h�t�H���[�h�Ƃ��Đ���ɗp���C�t�B�[�h�o�b�N���ԗ��̑��x�ƖڕW���x����p����PI����Ƃ���Ɖ��L�̐����̂悤�ɂȂ�D
![]()
�����ŁCt�̓g���N�w�ߒl�CV�͎ԗ����x�CVt�͖ڕW�ԗ����x�ł���D�܂��CKf�����z���ɑ���Q�C���ł���CKp�CKi���t�B�[�h�o�b�N�Q�C���ł���D�܂��C���s�O����Ɏԗ����Q��������ꍇ�́C�ڕW���x���[���Ƃ��ďՓ˂�h�~����D
3.3�@���Ԃɂ�����
�{�����ŊJ�����������^�]�V�X�e����p���āC�R��̏��^�d�C�����ԁC�z�ԊǗ��R���s���[�^�C����єz�ԗ\��[�����g�����������s�����D�����ł͎����^�]�V�X�e���̎���������s���R��̏��^�d�C�����Ԃ�}�X�̂悤�ɔz�u�����D�ԗ�A�͖ړI�n�܂ł̒����������ł��Z���C�ԗ�B�͖ړI�n�܂ł̑��s�������ł��Z���C�ԗ�C�͖ړI�n�܂ł̒�����������ё��s�������ł������D�ȏ�̏����ŁC�z�ԗ\��[���ŁC�ړI�n��ݒ肵�\���Ƃ���C�}10�̂悤�ɁC���s�������ł��Z���C�ړI�n�܂ōł����������ł���ԗ�B���z�ԊǗ��R���s���[�^�ɂ��z�Ԃ���C�ړI�n�����������Ƃ�������D�܂��C�}11�́C�ԗ�B�̑��s�O�ՂƖڕW�O�����̈ꕔ���������̂��r���Ă��邪�C�{�V�X�e���̑��ǐ����p���邱�ƂŁC�ڕW�O���ɑ��ĒǏ]�ł��Ă��邱�Ƃ�������D�}12�́C�{�V�X�e���̑��x����̌��z���̃t�B�[�h�t�H���[�h���̗͂L���ɂ�鍷�ق��r���邽�߂ɁC���z�H��ڕW�ԗ����x10[km/h]���ő��s�������̂��ꂼ��̑��x�Ƒ��s�H�̌��z�����������̂ł���D���������ƁC���z�̎n�_�C����яI�_�ł̓t�B�[�h�t�H���[�h����Ȃ��Ɋւ�炸�C�ԗ����x�ɗh�炬����������̂́C�t�B�[�h�t�H���[�h������ق����C���̗h�炬���������}���Ă��邱�Ƃ�������D
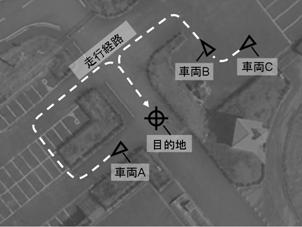
�}�X�@���Ԏ����ԗ��z�u�}
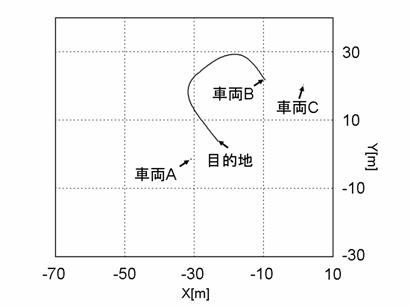
�}10�@���Ԏ����S�ԗ��O��
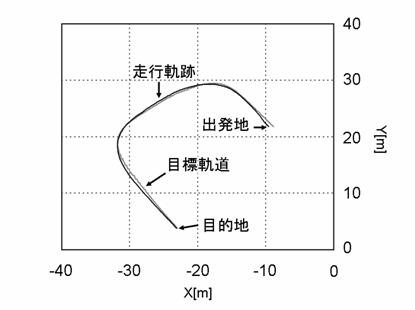
�}11�@���Ԏ����ԗ�B���s�O��
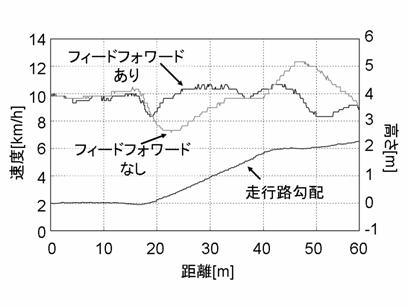
�}12�@�ԗ����x�ƌ��z�̊W
3.4 ���j�^�[����
���̐߂ł́C���j�^�[�����ɂ��ĕ���D���j�^�[�����͂X���̌I���s�ɂ������������o�āC10��12���Ɏ��{�����D�I���s�ݏZ�̈�ʏ����V����팱�҂Ƃ��C�u�������v�ɂ�����g���b�v���V�i���I�Ƃ����D�}�͎��������̔팱�҂ւ̐�����C�����̗l�q���������̂���D���j�^�[�̕��̔����́C�����ނˍD�]�ŁC����̊J���̎Q�l�ɂȂ�l�X�Ȉӌ���v�]�����D


4�D�܂Ƃ�
�@�{���ł́C�I���s�ɂ����郂�r���e�B�V�X�e���̊J���𒆐S�ɐ��ʂ�����D�{�����ɂ�����t�B�[���h���[�N�́C�x�o�ɂ����ẮC��Ƀ��r���e�B�V�X�e���̊J���Ɍg������w���B�̊����ɏ[�����ꂽ���C�S�̂̊����ɂ����Ă��l�X�Ȑ����o�b�N�O���E���h�Ƃ����w�@���E�w������̘A�g��ʂ��C�Љ��(��蔭��)�Ƃ���Ɋ�Â��Z�p�J��(������)�C�Z�p�̗L�����]�������n�œ����ɐi�߂Ă����C�ٕ���R���{���[�V�����^�̃t�B�[���h���[�N�������ł����ƍl���Ă���D
�@�{�����̎��؎����́C�Ȋw�Z�p�U��������E��[�Z���̈�C�m�x�[�V�����n�o���_�̌`���w�R�E���r���e�B�Љ�̑n���x�̘g�g�݂Ŏ��{���ꂽ���̂ł���D��L���؎����́C��w�@���ɂƂ��āC���n�ł̃t�B�[���h���[�N�ɂ���蔭���C�������ւ̋Z�p�J���E�^�p�C�J���Z�p�̗L�����]���Ƃ������C�l�X�ȕ���̑�w�@�����A�g���Ė�蔭����������Ɏ���v���Z�X�𐋍s�E�̌��ł���L�Ӌ`�ȃt�B�[���h���[�N�ƂȂ�D�������C2008�N�x�́w�R�E���r���e�B�Љ�̑n���x�̌�����́C���[���㒼�ڌo��ő�w�@���̗�����x�o���邱�Ƃ��ł����C��w�@���炪���̃v���W�F�N�g�̒��ŋ@���I�Ɋ��C�R�~�b�g���邱�Ƃ�����ȏł������D����C�w�p�𗬎x�������ɂ��x��������C��w�@����̃t�B�[���h���[�N�������ɍs�������ł������ƂɐS��芴�ӂ̔O��\���グ��D