��i�I�ȏ��ʐM�E�ړ��̃V�X�e���̓��� �ɂ��n���s�s�̃R�~���j�e�B������II
������\�ҁ@���썎�F
1. �͂��߂�
�{�����́A��l��莩���^�]�d�C�����ԁi�ȉ��A�ړ��̂ƌĂԁj��p���āA�ړ��̂ƕ��s�҂̍���Ԃ�z�肵��������Ԃɂ����āA���s�҂���݂��ړ��̂̈��S���S�]�����s�����Ƃ�ړI�Ƃ��Ă���B
�ߔN�A�����^�]�≓�u���c�ɂ��d�C�����Ԃ̊J���Ɋւ��錤�����i�߂��Ă���B�������A���s�҂⑼�̎����ԂȂǂƂ̍���Ԃɂ����鎩���^�]�d�C�����Ԃ��A���s�҂⎩�]�ԗ��p�ҁA���̎ԗ��^�]��ɂƂ��Ăǂ̒��x���S�E���S�Ɋ�������̂��A�𖾂炩�ɂ��������͏\���ɒ~�ς���Ă���Ƃ͂����������B
�����Ŗ{�����ł́A�ړ��̂ƕ��s�҂̍���Ԃ�z�肵��������ԂɈړ��̂𑖍s�����A���ʂ���߂Â��ړ��̂ɑ��āA�@�s���������������ƇA�댯��������鋗�����v�����A�ړ��̂ɑ�����s�҂̃p�[�\�i���X�y�[�X�𖾂炩�ɂ���B���ɁA�ړ��̂̑��x�A�팱�҂̗����ʒu�A�ړ��̂̏�Ԉ��̗L���ɂ�鍷�ق��r���������B
2. �����̕��j�ƕ��@
2-1 ���͂̕��j
�{�����ł́AOmae et
al. [1]���J�������ԗ������^�]���䑕�u����l���d�C�����Ԃɓ��ڂ����ړ��̂��g���A�{�錧�I���s���̎�����Ԃɂ����Ď��������{�����B�ړ��̂̎ԗ����x�A�ړ��̏�Ԉ��̗L���A���s�҂Ɍ����Ă��팱�҂ƈړ��̂Ƃ̑������ɉ����āA�i������ړ��̂ɑ��ć@�팱�҂��s���������������ƁA�A�댯�������ĉ�����鋗�����v�������B
�v�������@�ƇA��2��ނ̋����ɂ��āA�ړ��̂̎ԗ����x�ƈړ��̏�Ԉ��̗L���A�y�ї����ʒu�ɉ��������ق��r��������B�팱�Ґ��Ǝ������s���������A�������̊��i�V��Ȃǂ̋C�ۏ����j�ɉ����������Ȏ����v��Ɋ�Â��f�[�^�l���Ɍ��E������B�����Ŗ{�����ł́A���̂悤�ȏ������ł̌���ꂽ�T���v���̃f�[�^��͂ɓK���Ă���A�x�C�Y���v�̎�@��p���Ď����O���[�v�Ԃ̍������������B��̓I�ɂ́A�K�w�x�C�Y�@�ɂ��@�ƇA�̋����Ɋւ���m�����z���V�~�����[�V�����ɂ�苁�߂���ŁA�m�����z�̍��̑召���r�����B
2-2 �����T�v
�{�錧�I���s���k���Ɉʒu����בq�}�C���p�[�N�̕~�n���ɁA�ړ��̂��J��Ԃ������O���𑖍s�ł��������Ԃ�p�ӂ����B�ړ��̂Ɣ팱�҂̈ʒu�c����e�Ղɂ��邽�߁A1.5m�~13.0m�̋�ԏ��0.5m�O���b�h���������A�ړ��̂̉������ɂ��e���������ł���قǏ\���L���ړ��̑��s��Ԃ��m�ۂ����B
�{�����ł́A�팱�҂̐��ʂ���ڋ߂���ړ��̂ɑ��āA�@�ړ��̂Ƃ̏Փ˂��s�����Ɗ������ꍇ�ɋ��肷��A�A�X�ɐڋ߂���ړ��̂���Փˉ������A�ƌ���2��ނ̔�����팱�҂ɗv�������B���̏�ŁA�@�̋��肵�n�߂����_�ł̈ړ��̂̈ʒu�A�A�̏Փˉ���������_�ł̈ړ��̂̈ʒu�A�����ꂼ��L�^�����B�ȉ��ł́A�@�Ɋւ��鋗�����u�s���������������v�A�A���u�댯��������v�ƌĂԂ��Ƃɂ���B
�ڋ߂���ړ��̂ɑ���팱�҂̃p�[�\�i���X�y�[�X��c�����邽�߁A�ړ��̂��i��������������Ƃ��āA����������0m����1.5m�܂�0.5m���A�팱�҂̗����ʒu��ς����B�X�ɁA�����^�]�ԗ��̑��x�i6km/h�y��10km/h�j�Ə�Ԉ��̗L���ɂ�鍷�ق����������B��l�̔팱�҂ɑ��āA�����ʒu4�p�^�[���A�ړ��̑��x2�p�^�[���A��Ԉ��̗L��2�p�^�[���̍��v16�p�^�[���̎�����5���{�����B
�������Ԃ�2009�N8��9��〜11���A10�ォ��50��̒j���v6���ɑ��Ď������s�����B�팱�҂ɂ́A�ړ��̂������^�]�ł��邱�ƂƁA�����O����𑖍s���邱�Ƃ�\�ߓ`�����B�܂��ړ��̏�Ԉ��ɂ́A�ԗ��̃n���h�������炸�A���ʂ������č���悤�ɗv�������B
�}
2. �����̗l�q

�\1. �����p�^�[��
|
�ړ��̑��x |
6km/h�A10km/h |
|
�����ʒu |
0.0m�A0.5m�A1.0m�A1.5m |
|
��Ԉ��̗L�� |
�L��A���� |
2-3 ���͕��@
�O�߂Ŏ��������@�ɂ�蓾��ꂽ�����f�[�^��p���A�����p�^�[�����́u�s���������������v�Ɓu�댯��������v�̊m�����z���A�}���R�t�A�������e�J�����@�̃M�u�X�T���v�����O�ɂ��x�C�Y���肷��B�Ȃ������ł́A�e�p�^�[����5��̎��s�̂����A�ŏ��̎��s�f�[�^������4�̎��s�f�[�^��p���Đ��肷��B�M�u�X�T���v�����O�̐�����10,000��Ƃ��A����m�����z�̕��ϒl���r����B�{�����ł́A�ړ��̑��x�Ɨ����ʒu���ɁA��Ԉ������Ȃ��ꍇ�̎��㕽�ςƏ�Ԉ�������ꍇ�̎��㕽�ς̍����r��������B�m�����z�́A���U�ψ�̏ꍇ�ƕ��U�s�ψ�̏ꍇ�ƂŁA���ꂼ�ꋁ�߂��iHoff [2]�j�B
3. ���͌���
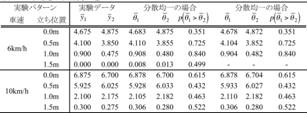
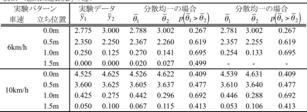
�u�s���������������v�̈Ⴂ��\2�ɁA�u�댯��������v�̈Ⴂ��\3�Ɏ����B
�\ 2. �u�s���������������v�̈Ⴂ
�\3. �u�댯��������v�̈Ⴂ
4. ���_�ƍ���̉ۑ�
�{�����ł̎����ƕ��͂�ʂ��ē���ꂽ��Ȍ��_�́A�ȉ��̒ʂ�ł���B
�E
�s���������������A�댯��������Ƃ��ɁA�ړ��̂̑��x6km/h�̏ꍇ�A�^���ʂ���̈ړ��̂̐i���ɑ��ẮA��Ԉ�������ꍇ�ɂ͏�Ԉ������Ȃ��ꍇ�Ɣ�r���āA���ΓI�ɑ傫���B���̑��̏ꍇ�ł́A��Ԉ������Ȃ��ꍇ�ɂ͏�Ԉ�������ꍇ�Ɣ�r���āA���ΓI�ɑ傫���B
�E
�ړ��̂ƕ��s�҂Ƃ̂���Ⴂ���ɁA����6km/h�̏ꍇ�ɂ͊Ԋu����1.0m���x�m�ۂ���Ă��邱�Ƃ��]�܂����A����10km/h�̏ꍇ�ɂ͊Ԋu����1.5m�ȏ�m�ۂ���Ă��邱�Ƃ��]�܂����Ƃ�����B
���H�\���߂ł͕��s�҂̃X�y�[�X����1.0m���x�m�ۂ��邱�Ƃ����f���Ƃ��Ă���A�ړ��̂̕�����1.0m�ł���B���̂��Ƃ���A���s�҂��s���������邱�ƂȂ��ړ��̂Ƃ���Ⴄ�ɂ́A���s�҂ƈړ��̂̍���Ԃ�z�肵���ꍇ�A���H������3.5m���x�m�ۂ���̂��]�܂������Ƃ��������ꂽ�B
����A���s�҂���������ꍇ��A�����̕��s�҂ƈړ��̂���������ꍇ�A�����_�ō�������ꍇ�Ȃǂ�z�肵���댯����s�������{���A�m����[�߂����B
�Q�l����
[1] M. Omae, N. Hashimoto, H. Shimizu (2005) �gAutomatic Driving System for Light Vehicle with Easy Setup Feature�h, Proceedings of the 21st International Electric Vehicle Symposium.
[2] P. D. Hoff (2009) A First Course in Bayesian
Statistical Methods, Springer, N.Y.