学術交流支援資金:電子教材作成支援(2009年度)報告書
「モノ創り実験工房」
申請代表者: 環境情報学部 神成 淳司
教材作成・授業実施共同担当者: 政策・メディア研究科 大前 学
環境情報学部 高汐 一紀
環境情報学部(非常勤) 斉藤 賢爾
1.
始めに
標記の科目は、「モノ創り(造り)」の基本を実践的かつ体系的に学ぶ事を目的として、2007年度に新規設置された科目である。従来のSFCカリキュラムでは、この分野の内容が不足しており、ο棟2回にモノ創り部屋を2部屋新設。その設備を活用して様々な取り組みを進めている。
当初想定していた履修者は、大学入学前、あるいは入学後の課外活動において、モノ創りに関する基礎的な知識と経験を持つ学生である。半田ごてや工具の使い方、あるいは電子工作の基礎は、興味があれば誰もが気軽に取り組める内容であり、最低限度の知識は義務教育時点において習得済みである。そこで、2007年度、2008年度の2カ年に渡り、本学術交流支援資金の援助を受け、これら基礎的な仕様を持つ学生が、SFCの強みであるソフトウェア分野と組み合わせたモノ創りを実践的に学ぶためのカリキュラム構築を進めてきた。具体的には、実践的とは「試行錯誤」を指す。4人の教員が、それぞれ異なるカリキュラムを提供する。履修者は半年間という短い授業で、4回の「発想→プロトタイピング」の素養を養う機会が得られる。初期段階の「試行錯誤」においては、多様な経験を培うことが重要であり、その意味でも昨年度までに実施してきたカリキュラムは、学生に充分な経験を与えていた。
その一方で、課題として出てきたのが、モノ創りに関する基礎的な素養を持たない学生への対処である。本授業は、2007年度と2008年度の開講に際し、履修の前提となる授業を複数指定すると共に、前述したようなモノ創りに関する基礎的な素養がある学生を対象としたものであることを表明していた。それに対し、複数の学生より、「大学入学前の段階ではモノ創りに取り組む時間的余裕もなく、基礎となる知識や技能が存在しないものの、今後の情報技術活用分野を想定すると、是非、履修したく、対応を願いたい」という意見が各教員に寄せられた。SFCにおいてPDCAサイクルに基づくモノ創りを実践的に学ぶカリキュラムが本授業のみであることを踏まえ、2009年度は、本学術交流支援資金を用いて、モノ創りに関する基礎的な素養を持たない学生についても対象となる事を目的に、2課題を新たに構築し、残り2課題については改修を加えた。
2.
教材開発の目的
講義・演習は,4つの課題によるオムニバス形式で進行し,クール毎の自己レビュー,相互レビューとディスカッションを通して,自己表現手法と評価方法(質的考察力,量的考察力)の習得を目指す.本プロジェクトの目的は,試験的ではあるものの運用を開始した「モノ創り工房」のインフラに合わせ,より安全かつ効率的に,上記の主題を満たす教育を実現するための教材を開発することにある.学生が個別に使う教材,グループごと,あるいは,クラスごとに使用する教材を検討・開発し,各クラスの授業運営を満たす教材を整備し,講義・演習での実使用を通してその有効性を評価する.本プロジェクトで開発・整備する教材は,以下の4課題である.
·
「センサ素子の原理と無線センサユニット」
·
(新規)「コンピュータでつくる簡単なマイコン」
·
(新規)「無線を意識させる工作教材の開発」
·
「LEGO
MindStormを用いた自律移動ロボット構築・プログラミング」
各教材に求められる要件としては,以下のようなものが挙げられる.
·
「モノ創り実験工房」授業の趣旨を実現すること
·
20人程度の学生に対する講義・演習が可能であること
·
安全性が十分に考慮されていること
·
学生の不注意による機材の紛失,破損の可能性が少ないこと
·
教材としての耐久性が高く,長期間の使用に耐えられること
·
情報システム,デバイス,機械システムの分野の題材をバランスよく扱えること
·
教材使用とその指導方法が分かりやすく,経験の浅い教員でも活用可能であること
本プロジェクトで開発した教材を春・秋開講の講義・演習で用い,学生からのフィードバックをもって,本プロジェクトの評価とする.具体的には,上記の目的の達成の度合いを,被験者たる受講者にSFC-SFSあるいはアンケート等によって評価してもらい,得られた結果により,本研究で開発した課題の有効性を検討する.発見された問題箇所については,今後の課題として整理し,次年度以降の講義・演習の改善に役立てる方針である.
3.
教材の具体的内容
3.1. 教材の全体像
上記のように本プロジェクトでは,情報科学,デバイス,機械の分野の題材を扱うことを目指し,
·
「センサ素子の原理と無線センサユニット」
·
(新規)「コンピュータでつくる簡単なマイコン」
·
(新規)「無線を意識させる工作教材の開発」
·
「LEGO
MindStormを用いた自律移動ロボット構築・プログラミング」
の4課題を扱う教材を整備した.受講生は,1つの課題に対し3回(6コマ)の時間を使って取り組む.これにより,1学期間に4つの全てのテーマを網羅することを可能にした.以下の各節において,各課題の教材について,教材のねらい,整備状況と評価,今後の展望について述べる.
3.2. 教材「センサ素子の原理と無線センサユニット」
3.2.1.
教材のねらい
実際のところ,センサやセンサネットワークを使ってはいても,それらがどう動いているのかを意識している人は少ない.本実験・演習課題では,基本となるセンサの原理からセンサユニットとして機能するまでを,身近な材料を使ったセンサ素子の製作・計測と,ドライブ回路の実装・計測,センサネットワーク上への接続と精度測定を,学生自身が体験することにより理解してもらう.
3.2.2.
教材の内容
本教材を利用した実験・演習の実施内容は次の通りである(講義資料抜粋).
1 . 湿度センサ素子の製作・特性計測
環境の変化やバイタルデータをコンピュータ上でシンボリックな情報として扱うにはどうすればよいのだろうか?基本は物理変化を電気信号として捉えることにある.第1回目は,物理量の変化を検出し電気信号の変化に変換するセンシングの原理を理解し,各種センサ(素子,ユニット)の基本構造を学ぶとともに,手近な材料を使ったセンサ素子を設計,製作,その特性を計測・評価する.センサの製作には調べたい物理量によって電気的(電子的)特性が変化する物質・素子が必要だが,ヒントは身近なところにころがっている.


図4-2-1 センサの素材と材料
1 . センサユニットの実装・動作検証
第1回目で実装したセンサ素子を利用するには,静電容量の微量な変化を計測する高精度の専用計測器が必要であった.実際のセンサユニット(モジュール)として利用するには出力に工夫が必要となる.第2回目は,先に製作したセンサ素子に「静電容量−電圧変換」回路を追加することで,汎用センサユニットとしての完成度を高める.
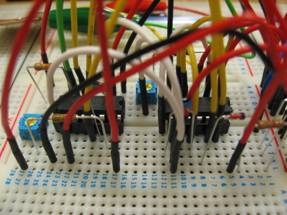
図4-2-2 センサユニット(ドライブ回路)
2 . 無線センサネットワークノードへの接続と自作ユニットの精度測定
センサユニットで計測されるデータをコンピュータ上で扱うには,アナログ情報をデジタル情報に変換する機構「A/Dコンバータ」が不可欠となる.また実環境での利用状況を想定すると,観測データをデジタル情報として無線で送信できれば便利である.第3回目は,既存の無線センサネットワークのインフラをうまく活用し,実装したセンサユニットを無線センサ・ノードとして完成させることを目指す.

図4-2-3 無線センサ・ノード(MICAz-Mote)
その他,ユビキタス時代を支えるモノとサービスのアーキテクチャ解説,モノ(実世界)と情報世界の架け橋となる2つの量,アナログとデジタルについての解説を各回に実施した.
3.2.1.
教材の構成
教材の構成は以下の通りである.
·
MICAz-Mote無線センサ・ノード(MPR2400J)
·
MICAzセンサボード(MDA320)
·
MICAz無線基地局(BU2400J)
·
LAN接続用基地局サーバ(Stargate
NetBridge NB100)
·
デジタルマルチメータ(FLUKE
179)
·
デジタルLCRメータ(CUSTZOM ELC-133A)
·
スコープメータ(FLUKE
199C)
·
独自湿度センサ(図3-2-4,図3-2-5)
·
独自ドライブ回路(図3-2-6)
·
解説資料(PPT,PDF)
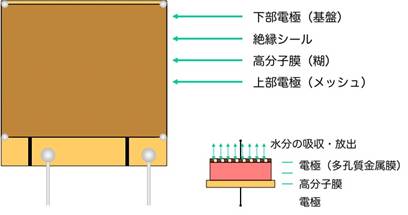
図3-2-4 独自湿度センサの概念図

図3-2-5 湿度センサ
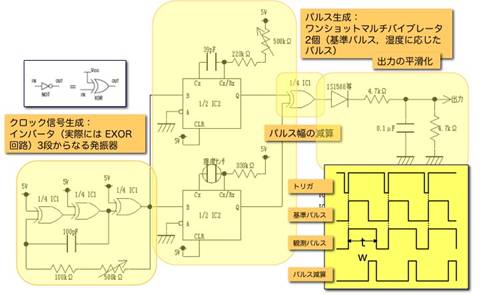
図3-2-6 センサユニット:回路図
3.2.2.
教材の整備・改良とその効果
本教材のねらいは,先に述べた通り,基本となるセンサの原理からセンサユニットとして機能するまでを,身近な材料を使ったセンサ素子の製作・計測と,ドライブ回路の実装・計測,センサネットワーク上への接続と精度測定を,学生自身が体験することにより理解してもらうことにある.試行錯誤の実践に重きをおき,モノ創りの基礎である発想・設計(Plan),プロトタイピング・計測(Do),評価・分析(Check),処置・改善(Act)を繰り返す螺旋状のプロセス(PDCA
cycle),特に,各フェーズでの自己レビュー,相互レビューとディスカッションを通して,次回の発想・設計プロセスに繋がる「評価→改善」のプロセスの意義を,体感してもらうことを目指した.
実験・演習は,銅基盤への回路パターンの削りだしとパーツの切り出し,誘電体試料の塗布,はんだ付けによる各パーツの組み上げといった,簡単な工作から始まり,電子回路の動作理解とブレッドボード上への実装,各種測定器を使った調整,そして,既存の無線センサネットワークインフラを利用した実環境でのデータ測定と性能評価へと進行する.内容も進行に併せて徐々に高度なものになるようにデザインした.基本的に,論理回路や電子回路の基礎知識がないと履修が難しい内容であったため,解説資料の工夫と併せて,デジタルオシロスコープ等を用い,回路の動作と調整過程を視覚的に理解できるように留意した.特に,今期,LAN接続用基地局サーバを導入,Mote Explore環境を整備したことにより,昨年度まで教員用PC上でのみ観測が可能であったセンサデータと精度検証用比較データ(いずれもセンサネットワーク上の観測データ)を,各自のPCのWebブラウザ上で観測,ログの取得を可能にした効果は大きく,結果,本教材で最も力を入れた「自作センサ素子の特性に合わせた回路調整」の過程と意義を,履修者各自が正しく理解できていたようである(図3-2-7,図3-2-8).
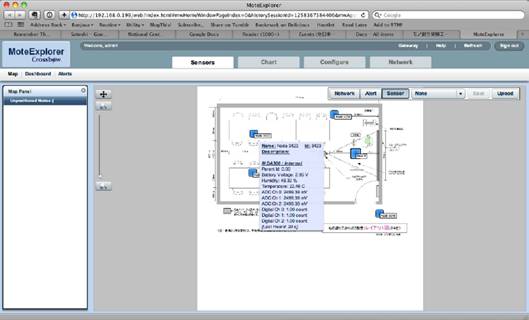
図3-2-7 MOTE Exploreでのデータ観測の様子(1)
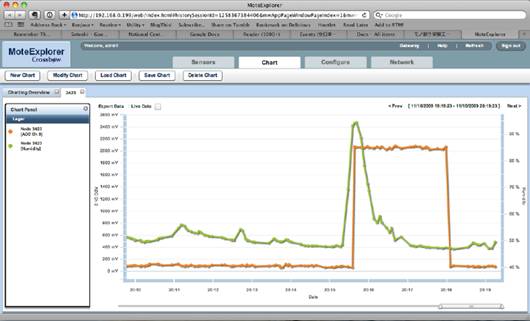
図3-2-8 MOTE Exploreでのデータ観測の様子(2)
自作素子にはばらつきがあるため,その特性によっては,回路中各所の時定数値(RC値)そのものを変更しなければならないケースも度々あったが,こちらからの指示前に気づき,自ら適切な値に調整した学生が現れたのは,昨年度に続き頼もしい限りであった.教材そのものに関しては,科目設置時に想定していたものをほぼ揃えることができたと考えている.さらにスタート当初に問題となっていた自作センサに生じた性能の想像以上のばらつきに関しては,当初の製造工程を見直し,昨年度より工房部屋に導入済の基板加工機(図3-2-9)を使用,素子基板自身の均質化を図った.併せて,調整時の安定環境として除湿器と卓上加湿器の導入による簡易恒湿環境を用意し,各種調整作業の効率化を図った.

図3-2-8 モノ創り工房(o23)基板加工機
3.2.3.
教材の評価と今後の展望
例年の傾向ではあるが,春学期は秋学期と比較して履修者がやや少なめだったこともあり,学生ひとりひとりへの対応に通常よりも多くの時間を割くことができ,学生も満足しているようである.
·
大学に来てから一番手を動かし一番楽しめた授業
·
リアル世界とデジタル世界を繋ぐセンサを学ぶ事が出来,その重要性と面白さに気づく事ができました
·
「ものづくり」「工作系」「プログラミング」「パソコン」に興味がある人にとっては,もうたまらないくらい面白い講義
·
SFCで今まで履修した授業の中で圧倒的に一番楽しかった
(提出レポート,SFC-SFSアンケート結果より)
中には,電子回路の知識がほとんどなく,不安に感じていた学生もいたようであるが,わからなければわからないなりに手足を動かし,組み上がった回路の動作から詳細を理解するというやり方で対応した.
一方,秋学期は昨年度よりはやや余裕があったものの,1クラス8人体制での実施となった.教材・機材的には十分な量を確保したつもりではあったが,ο23という部屋自体のキャパシティがやはり大きな制約となった.TA/SAを加えて10人以上ともなると,1人あたりの作業スペースが手狭となり,多くの機材を同時に使用する本テーマのような実験・演習では作業に支障が出るケースも見受けられた.さらに,基盤加工機が1台のみという現状では,各作業プロセスでの待ち時間が長くなり,その対応に苦慮した.
また,SFCのカリキュラム上,履修者の知識にばらつきがあるのはやむを得ないことではあるが,前提・推奨・関連科目の指定をより詳細に行う等の対応が必要であると思われる.また,各クール2時限×3回という時間設定が課題の実施において短いという事実は如何ともしがたく,引き続き,今後の最重要検討課題であろう.
3.3.
教材「コンピュータでつくる簡単なマイコン」
3.3.1. 作成した教材のねらい・内容
◎ねらい
論理回路は、並行に動作する要素が繋がった、デジタル信号のネットワークであるが、中でもCPU (Central Processing Unit) は、現在の情報環境を支える重要な技術的要素であるとともに、計算機やネットワークの基本概念を理解する上で最適の教材でもある。そのCPUを実際に学生が構築し、動かすことで、その回路の基本を体感的に理解してもらうことを狙う。
◎内容
この教材にて実施する内容は次の 3点である。
(1)
電子ブロックによる簡単な論理回路の製作 (NAND ゲート等)
(2)
Verilog HDL (Hardware Description Language) による論理回路の記述
(3)
簡単な CPU 回路の製作とその拡張
2007年度、2008年度には、渡波 郁 (著)「CPU の創りかた」(毎日コミュニケーションズ) で紹介されている、TD4 (とりあえず動作するだけの 4bit CPU)と互換性のある 4bit CPU シミュレータを Overlay GHC 言語で開発したが、2009年度は、TD4 の設計概念をより実用的に拡張したTT8 (とりあえず使える 8bit CPU) を Verilog HDL で記述し、FPGA ボード上に実装した (図3-3-1)。

図3-3-1. FPGA ボード上に実現されたマイコントレーニングキット
◎教材の構成
教材は以下から構成される。
・ 電子ブロック (学研 大人の科学シリーズ 電子ブロック
EX-150 (復刻版))
・ マイコントレーニングキット
Ø
FPGA としてXilinx社 Spartan-3A スタータキットを利用
Ø
PS/2 キーボードを接続して利用する (図3-3-2)
・ Verilog HDL 処理系 (Icarus Verilog)
・ 波形表示ソフトウェア (GTKWave)
・説明スライド
(Microsoft PowerPoint)

図3-3-2. キーボードと接続されたマイコントレーニングキット
マイコントレーニングキットはTA 松谷健史により開発されたものである。春学期は、松谷君の教育体験を兼ね、その他の教材の選定・開発においても中心的な役割を果たしてもらった。
3.3.2. 教材の効果
この教材では、最初に電子ブロックを用いて実際に回路を製作し、トランジスタの仕組みを体験するところから始まって、デジタル回路の基礎を体験し、さらにマイコントレーニングキット上での機械語プログラミングを体験してもらうことで、コンピュータの原理そのものに慣れ親しむ効果が期待できる。次にそれをHDLにより記述するソフトウェアとして捉え直して表現することにより、同一概念を異なる言語で表現することにも似て、システムに対して、より深い理解を得られることも期待できる。また、広く使われている Intel CPU との比較も行うため、現状の技術の理解も深められると考える。
結果として、多くの学生にとって、ブラックボックスであった論理回路に対する興味を育成でき、CPU回路の基本を理解してもらうという目標は達成できたと考える。
3.3.3. 今後の展望
◎指導法
教材の内容に対して、2コマ x 3回で一巡するという授業時間の短さは、引き続き反省すべき点であると考える。特に、実習時間が不足していると考えられるので、必要に応じた補講なども考えた、時間をかけた学習を考えていきたい。
◎教材の進化
FPGA
ボードを利用した授業は、昨年度までのパソコン上でのシミュレーションと比較して、よりコンピュータの心臓部を自ら操作しているという体感にあふれたものになったと思う。
更に発展させるとすると、最新のアーキテクチャの特徴的な部分 (例: マルチコア) を取り出した実習などが実現可能ではないかと考えている。
また、回路の動作の視覚化や、ハードウェア記述そのものの視覚化などにも取り組んでいきたい。
3.4.
教材「無線を意識させる工作教材の開発」
3.4.1. 作成した教材のねらい・内容
◎ねらい
現状において、本授業は1クラスあたり、4人の担当教員により実施されている。運用の融通性等を鑑みると、少数の教員で数多くのテーマを実施できることが望ましい。ここで述べるものは、共通テーマ的に実施できるものづくりを対象とした教材である。教材のテーマとしては、現状の内容でカバーできていない無線に焦点を当てている。この教材では、運用においては、共通テーマ的に実施できる(どの担当教員でも実施可能)こと、教育においては、教育無線、アナログ回路、デジタル回路に関する知識の醸成をねらいとする。
◎内容
この教材にて実施する内容は次の 3点である。
(1)AM電波受信器の製作
(2)AM電波送信器の製作
(3)通信実験
AM電波受信器の製作においては、受信回路、アンテナを制作し、中波帯の無線号を受信し、イヤホンで聞くことができる回路の構築を実施する。簡単に言えばAMラジオであるが、SFCの環境においては、一般放送の電波は弱く、(2)で製作する送信器からの電波を受信する。回路としては、アナログ回路の理解を深めるため、1石のトランジスタラジオとした。ゲルマニウムラジオ、1石トランジスタラジオ、2石トランジスタラジオ、3石トランジスタラジオ、レフレックスラジオ等の構成の中で、仕組みが分かりやすく、トランジスタの性質の理解の助けにもなり、工数も少ない点により1石トランジスタラジオの構成とした。また、半田付け等が不要なように各部品はブレッドボード上で配線できるようにした。
AM電波送信器の製作においては、水晶発信器から微弱な電波を出せることに着目して、デジタルICにて、水晶発信器の発信のON・OFFを行うことで、単音やメロディーをAMにて送信できる回路とした。
通信実験においては、送信器でメロディーを送信し、受信器で受信することによりアンテナの工夫などを評価したり、送信器にて単音をボタン操作で送信し、受信することで、モールス信号に類似した情報のエンコード、受信後のデコード等デジタル情報通信の基礎を学べるものとした。
3.4.2. 教材の構成
教材は、以下の機器で構成される。
受信器(1グループあたり)
・ブレッドボード×1
・単3電池ケース×1
・単3電池×1
・抵抗30kΩ×1
・抵抗1MΩ×1
・セラミックイヤホン×1
・NPNトランジスタ×1
・コンデンサ1000pF×1
・バリコン×1
・バリコン用ダイヤル×1
・リードインダクタ330μH×1
・ミノムシクリップつきジャンプワイヤ(長)×1
・ミノムシクリップつきジャンプワイヤ(短)×2
・アンテナコイル用銅線20m×1
・ジャンプワイヤ×4
・回路図(ラジオキット用)×1
・ラジオペンチ×1
・紙ヤスリ(銅線の被膜を削るため)×1
・チャックつき袋(収納用)×1
送信器(1グループあたり)
・ブレッドボード×1
・単3電池ケース×1
・単3電池×4(受信器用1個を含む)
・水晶発振器(1.3MHz)×2
・オルゴールIC×1
・12ビットリップルカウンタIC(分周IC)×1
・スイッチ×3
・コード銅線10m×1
・ジャンプワイヤ(適宜)
・ チャックつき袋(収納用)×1
受信器の構成は、上記の内容にて述べたように1石トランジスタラジオであり、シャンテック電子にて販売されているキットの回路を参照して、ブレッドボード上で構成できる形にした。図3に回路図と、ブレッドボード上での配線、および受信器の全体図を示す。
送信器の構成は、上記の内容にて述べたように水晶発信器を用いた回路である。図4、図5に音楽を送信する場合の概要図とブレッドボード上での配線、単音(音の高さを変えることができる)を送信する場合の概要図とブレッドボード上での配線を示す。
図3 受信器の回路図とブレッドボード上での配線
図4 メロディーを送信する送信器の概要図とブレッドボード上での配線
図5 単音を送信する送信器の概要図とブレッドボード上での配線
3.4.3. 教材の効果
本教材は、開発段階であり、まだ授業での運用に供していないため、効果について明確なことは言えない。ただし、「環境情報学の創造」にて、試行的に受講生に扱わせてみたところ、上記の構成物にて安全に受信器や送信器を、ハンダ等を用いずに安全に構成できることを確認した。教材の再利用性については、抵抗等の素子については、ブレッドボード上に挿す際の足の切断長さによっては、再利用が難しくなることを確認した。また、受信器のループアンテナの作成においては、銅線の再利用が不可能であることを確認した。電池についても、授業時の消耗は少ないものの自然放電による消耗により、交換が必要となる。
3.4.4. 今後の展望
教材のねらいについては、教育面での効果としては、今回開発した教材により達成できると考えているが、運用面においては、共通的に使えるということを考えた場合、消耗品などのコストを抑え、さらに消耗品の入手の容易さなども考慮した教材設計が必要になると考える。また、共通機器として、オシロスコープやLCRメータなどの導入も検討していく必要がある。
3.5. 教材「LEGO MindStormを用いた自律移動ロボット構築・プログラミング」
3.5.1.
教材のねらい
2007年度より、LEGO Mindstormを題材として、PDCAサイクルを考慮した自律歩行ロボットの自作とプログラミングを実施している。正直なところ3回という非常に短い期間で、ハードウェアの構築とプログラミングの双方に取り組むのは非常に難しい。1回あたり2コマ、180分の授業時間があったとしても、多くの履修者は授業時間内に終了せずに授業後の時間を費やしてロボット構築やプログラミングに取り組んでいる。この際、最も重要な点は、実世界を意識してプログラミングを実施するという事だ。自律歩行ロボットについては、基本的なひな形をこちら側で提供し、それを改修して最終的に目的となる動作へと結びつけるのであるが、机上と床面とでは摩擦係数が異なる。それぞれの摩擦係数に適したプログラミングの修正をするか、あるいは双方に対応できるようにロボットの足裏部分の形状を変形することが求められる。実際に満足に動作しないロボットの動作を踏まえたプログラミング経験は、SFCの他のプログラミング系授業に欠けているものであるが、今後のユビキタス社会の進展においては非常に重要なものである。
3.5.2.
教材の内容
この教材において実施する内容は,以下の四点である.
1 . LEGO
MindStormを用いたプログラミング実習
2 . LEGO
MindStormを用いた二足歩行ロボットの組み立てと動作解析
3 . 上記ロボットの動作改良と,それに会わせたプログラミング構築
4 . 改良したロボットの動作確認
LEGO
MindStormで用いるプログラミング環境は,計測制御部分で主に導入されている,米国National
Instruments社製のプログラミング環境LabVIEWを基にしたもので,インタフェースと機能を,LEGOロボット用に最適化する事で,容易にロボットプログラミングに取り組める環境を提供している.今回の教材では,このプログラミング環境を用いる事で,3回という非常に短い期間内で、プログラミング経験が乏しい学生をも対象にすることを可能にしている。なお、今年度は、途中から、LEGO
Mindstorm用のプログラミング言語環境のバージョンアップを実施している。これは、WindowsOSがWindows7へと移行したことを踏まえ、いくつかのデバイス等において不具合が出てきたのに対処したものである。
次に,二足歩行ロボットに関しては,参考として,Web上に公式に公開されている汎用の二足歩行ロボットの組み立て書を用いた.このようにしているのは,二足歩行ロボットのプログラムをゼロから組み立てる事は,習熟度によって異なるものの,一般的には10-15時間程度が必要であり,今回の授業時間内だけでは設計から構築までの全てのプロセスを経ることが困難という判断に基づいたものである。既存の二足歩行ロボットの動作を観察するとともに,あらかじめ配布されたプログラミング環境を提供し,そのプログラミングの一部改良と,ロボット自身の動作変化を比較する事を通じて,実世界で動作する事物のプログラミングの難しさを学ぶ事を狙いとしている.
その後,以下の課題のどちらかを授業時間内に実施する事を目的とする。
A . 上記の二足歩行ロボットの動作改良.具体的には,センサと連動した方向変更、後ずさり動作の実現(机上での動作を確認後、床面で動作)
B . 上記の二足歩行ロボットとは異なる,独自ロボットを用いた二足歩行の実現
授業の最終時間では、各人が、上述のAかBいずれかの作業を終了し、実際にロボットのデモンストレーションを実施する。この際までにロボットが目的とする動作を達成することが求められる。
3.5.3.
教材の構成
本教材の構成を以下に示す。
·
LEGO社製教育用 マインドストームNXT
·
同 拡張キット
·
同 開発用ソフトウェア(教材用クラスライセンス)
·
Windows / Macintosh OSが搭載されたコンピュータ
·
単3型リチウム乾電池
マインドストームには複数のパッケージが存在している。そのうち、今回使用したNXTは,レゴ社が教育機関用に発売しているもので,専用のUSBケーブルを介してプログラムがインストール可能な「稼働用中核ユニット」,「センサ機器(接触、LED、音、光他)」、「レゴブロック」、「モータ機器」、「ユニット接続ケーブル」、「PC接続用ケーブル」、「充電バッテリ」,「充電用ACアダプタ」,「レゴブロック収納用トレイ」により構成されている。レゴブロック自身は、通常のレゴブロックと同様の形状で、組み合わせることで様々な形状を実現することが可能である。「ユニット接続ケーブル」とは、「稼働用中核ユニット」と「センサ機器」、および「稼働用中核ユニット」と「モータ機器」を接続するもので、プログラミング内容に基づき、「稼働用中核ユニット」が、「センサ機器」、「モータ機器」を制御するために用いられる。
今回途中からバージョンアップした開発用ソフトウェアでは、従来と比較して対応できるセンサの種類が増加したのを始め、シミュレーション機能の強化など、より初心者にも対応した構成となっている。ただし、モノ創りの素養が不足している学生については、現状の教材構成では理解に時間を要する状況が多く発生した。そこで、今年度の最後には、イラストレーションと写真図面とを合成可能なソフトウェア等を導入し、来年度以降のカリキュラム強化に向けた取り組みを進めている。
また、LabVIEWのプログラミングは、学生各人が所有するコンピュータを利用することとした。この際問題となったのが、最近流行となってきたNetBookを持参する学生への対処である。多くのNetBookはDVD-ROMドライブが搭載されておらず、LabVIEWのインストールがそのままでは困難となる。今回の授業では、ネットワーク経由で他のPCのDVD-ROMをマウントすることで対応した。さらに、NetBookはハードディスク容量が少ないものが多く、数百MBを超える容量となるプログラミング環境のインストールが難しい学生もおり、これら学生に関しては、メディアセンターが貸与するPCを使用することで対応する事とした。
3.5.4.
教材の効果
本教材を用い,3回の授業回数で,所定の内容である独自の二足歩行ロボットの動作を発表するまでの行程を実施した。例年の傾向であるが、春学期は履修者数が秋学期よりもやや少ない。所定のカリキュラムはグループワークで実施するのであるが、3回という短期間で少ない人数で課題を達成するのが時間的にぎりぎりで、考え不足という状況も発生していた。その一方で、モノ創り経験の素養を持つ学生により構成されたグループは、2回目までの授業時間内で目的とする動作を完成させ、最後の1回は更に独自の機構改良に取り組む事が出来た。個々の学生が保有する素養を事前に把握することは困難であるが、これらのばらつきを抑え、履修者が短期間で充実した経験を積めるようにグループ編成前の面談やアンケート等を実施する事も検討したい。
本教材を用いた3回の授業の流れを以下に示す。
第1回目:サンプルロボット制作、プログラミング実習。
二足歩行ロボットとは異なる、最も汎用性の高い車輪走行ロボットの組み立て制作。並びに、同ロボットを用い、赤色ボールを手で跳ね上げるプログラミングの実習。プログラミングは教材として用意したサンプルプログラムを用いている。
第2回目:二足歩行ロボット制作。改修、プログラミング。
二足歩行ロボットの構築と改修に取り組む。二足歩行ロボットの基本構造の組み立て図面を配布。グループ毎に、その図面に従いロボットを制作する。この際、ロボットの動作プログラムも配布する。図面通りにロボットを制作し、プログラムを適用することで、ロボットは前進歩行と右折が可能となる。この二足歩行ロボットに「後退をさせる」のが、本教材の課題である。この際、前進歩行と右折動作が維持され、かつ、テーブル面と床面の双方で、これら動作を実現することが求められる。
第3回目:二足歩行ロボット改修、課題発表
前回授業に引き続き、グループ毎に課題を実現するためのロボットの機構改修、プログラミングの変更に取り組む。終了後、グループ毎に、二足歩行ロボットを用いたデモンストレーションを実施する。
課題を実現するためには、ロボットの二足歩行ロボット動作機構の分析が必要である。LEGO
Mindstormの機能的制約を受け、本ロボットの二足歩行は、二つのモータを片足ずつに用いているのではなく、一つのモータだけで実現している。そのため、そのままの構造では、後退する事は不可能である。また、床面の摩擦係数が低いため、そのままの接地面構造ではスリップし、満足に動作しない。本教材の特徴は、このように、ロボットの機構改修とプログラミング修正の両方が必要とされる点である。
前述したように、今回の授業では、実現に要する時間に多少の違いが生じたものの、全てのグループが課題を実現する事が出来た。モノ創りの基本的知識を持たない学生も個々には含まれていた事から、当初の目的としていた履修対象者の広がりという目的を実現したと考えられる。
5 総括
「モノ創り実験工房」は,従来のSFCカリキュラムで不足していた「モノ創り(造り)」の基本を実践的かつ体系的に学ぶ科目である。前述のように、その趣旨は「試行錯誤」の実践であり,ある程度の「発想→プロトタイピング」の経験を積んだ学生を対象としていたが、今年度は履修対象者を広げるための取り組みを進めた。具体的には、4教材のうち2教材について教材を新たに制作し、残り2教材については既存教材の内容に修正を加え、目的を達成できるようにした。これら教材を用い、次回の発想・設計プロセスに繋がる「評価→改善」に重点を置いたモノ創りのプロセスを体験することで,今後の研究活動に役立つ実践力が養われる。また、本プロジェクトの主眼である,教材自体の「モノ創り工房」インフラへの対応により,「モノ創り実験工房」の講義・演習を昨年度以上に効率的かつ安全に実施するための教材として,活用することも見込まれる。ソフトウェアとハードウェア双方を組み合わせた取り組みは、今後の情報システム分野の社会への適応に不可欠な方向性である。これは、認知身体の分野,環境の分野,デザインの分野においても同様である。本プロジェクトの成果は,分野を問わず,現在各学生の手探りで行われているモノ創り(造り)のプロセスの洗練化,効率化に貢献できると考える.