3.方法と実験:
3.1 デバイス
本研究を行なうにあたり,入力デバイスとして人口網膜カメラ(三菱電機)を選択した.人口網膜カメラは人間の網膜が持つ情報圧縮機能と並列処理機能をシリコンチップ上に集積化したCOMSイメージセンサである.網膜LSIはCCDイメージセンサと異なり,外界の画像を取り込みながらその画像に演算処理を加える機能と,各画素のアナログ出力信号のゲインをオンチップで調整する機能を内臓しているため,ある方向に傾く線分のみに反応するようにすることなどが容易に行えるといった特徴を持っている.
3.2視覚情報処理
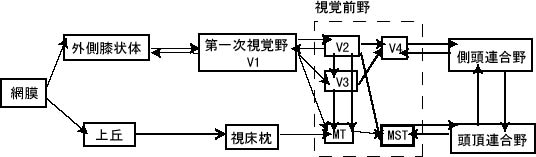
本説では視覚系の情報処理について概略を説明する.下図はブロックダイヤグラムで各領域間の情報の流れを示したものである.(サルを用いた実験で得られた知見)
網膜から脳への情報の流れは,外側膝状体を経由するルートと上丘を経由するルートに大きく分かれる..前者は形態視系ルートといい,パターン情報処理に関わる重要な経路であり,後者は空間視系ルートといい,眼球運動の制御に必要な視覚情報を提供しているものと考えられている.ここでは,形態視系ルート上にあるV1野に焦点を当てる.V1野は,視覚情報を構成しているもっとも初歩的な線分要素に分解する働きを担っている部分である.
我々はここで分解された線分要素自身の持つ自律性と要素の関係生成の多様性が,生物システムがもつ柔軟性を導きだしており,また,その多様性を決定付けているものは,要素が集まって出来る構造であり,それこそが生物システムの様々な行動を決定付ける設計図(プログラム)であると考えている.そこで,以下その要素への分解,および構造に着目する.
3.2.1 方位選択性ニューロン
方位選択性ニューロンとは,スリット光(長軸と短軸をもった細長い光)に反応するニューロンである.このニューロンは,1962年にヒュ-ベルとヴィーゼルが猫の1次視覚野の単一ニューロン活動を調べた実験で発見されたものである.なお,このニューロンはスリット光がついている間中活動を続けるのではなく,基本的にはON細胞タイプまたはOFF細胞タイプである.このニューロンが出現した理由としては,外側膝状体にある隣接した受容野を持ったニューロンが何個か配列しながら視覚野ニューロンに投射しているためだとする説が有力である.
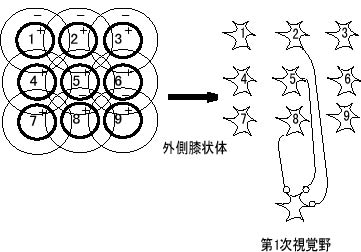
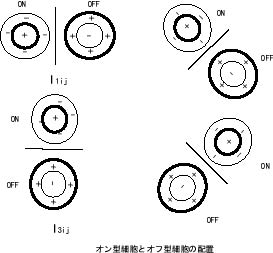
例えば外側膝状体にあるニューロンの受容野が図の様に並んでいたとすると,2,5,8から投射を受ける視覚野ニューロンは縦方位を持っているスリットには強く反応し,それとは違った方位を持ったスリットに対しては,周辺部の抑制性の影響によってニューロンには強い反応は現れない.外側膝状体と視覚野の間にはこのような投射のパターンが数多くあり,その結果,視覚野には方位選択性を持つようなニューロンが出現したと考えられる.
3.2.2 ハイパーコラム構造
大脳皮質には,表層の第1層から深部の第6層まで様々なタイプのニューロンが並んだ構造となっているが,垂直方向に位置しているニューロンは,反応の仕方が基本的に同じである.これは,大脳皮質に縦方向の機能的なまとまりが有ることを示している.スペインの細胞学者ロレンテ・デ・ノーは,皮質の単位として表面のI層からIV層のそこに及ぶ柱状の構造(コラム構造)があり,この中で,活動が局所的に起こっていると唱えた.
視覚野においては,同じ受容野を持ち同じ方位選択性を持ったニューロンが,最小単位として縦方向にコラムを形成しており,またその隣には方位が15度だけ違うコラムが並んでいる.
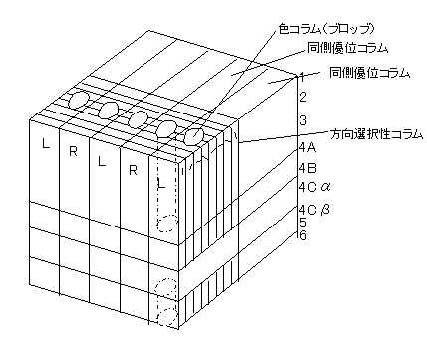
<参考:さるの一次視覚野のハイパーコラム構造 ヒュ-ベルとヴィーゼルより>
図の奥行き方向に皮質をたどっていくと,15度づつ方位は変化しつづけ,13番目に元と同じ方位を持ったコラムが現れる.このほか,左右の眼球の優位を示すコラムは,ブロップと呼ばれる色に応答するコラム領域を確認することができる.この3つのコラム合わせると,一つの大きな機能単位となる.この機能単位をハイパーコラムと称する.つまり,ハイパーコラムとは左右の目から視覚情報が入ってくる位置,同じ方向選択性ニューロンが並んでいる位置,色に反応するニューロンが並んでいる位置を1つにまとめた視覚野の構造モデルである.(ヒュ-ベルらはこれを「アイスキューブモデル」と呼んでいる )
3.2.3:方位選択性ニューロンのモデル化
ここでは,一次視覚野において,見られる方位選択性ニューロンをモデル化する方法を考える.方位選択性ニューロンフィルタのモデル化には,Marrの手法をベースに実現させた.このモデルは,フィルタとしてモデル化されたオンオフ細胞の配置位置によって,特定の方向を持つエッジのゼロ交差を抽出する.
対象となる領域に対し,オン型細胞への反応![]() ,オフ型細胞への反応
,オフ型細胞への反応![]() を生成する.ここで,オン型細胞,オフ型細胞への反応としてはそれぞれ次のようなフィルタを画像に対して施した結果である.
を生成する.ここで,オン型細胞,オフ型細胞への反応としてはそれぞれ次のようなフィルタを画像に対して施した結果である.
-0.5 |
-1 |
-0.5 |
-1 |
+6 |
-1 |
-0.5 |
-1 |
-0.5 |
ON型細胞
+0.5 |
+1 |
+0.5 |
+1 |
-6 |
+1 |
+0.5 |
+1 |
+0.5 |
OFF型細胞
次に,4方向のエッジのゼロ交差に反応するニューロン![]() の出力を式(1)から式(4)のように決める
の出力を式(1)から式(4)のように決める
![]()
![]()
![]()
![]()
それぞれ,オン型細胞とオフ型細胞が下図のように並んでいる.また,![]() を式(4)の様に正規化し,正規化後の方位選択性のニューロン出力
を式(4)の様に正規化し,正規化後の方位選択性のニューロン出力![]() を決める
を決める
ここで,θは,閾値のための定数である.
このモデルを用いて4方位のハイパーコラムを実現.弾性テンプレートモデルの前処理として用いて,手の形状認識を行った実験を次節に示す.
3.2.4.実験:(Power
Point)