| 申請区分 | 国際共同研究・フィールドワーク研究費 | |
|---|---|---|
| 研究代表者 | 所属 | 政策・メディア研究科 |
| 職名 | 教授 | |
| 氏名 | 古川康一 | |
| 研究分野 | 人工知能 | |
| 研究課題名 | 反射運動に基づく演奏動作モデルの構築とその検証方式の開発 | |
本研究では、弦楽器の演奏などにおける動作をヒトが元々持ち合わせている反 射運動に結び付けて説明するモデルの作成を目指した。具体的には、筋骨格系 に基づく運動のベイジアンネットワークによるモデル化を考え、その中に反射運動を 組み込む方法を検討した。本成果は、英国のロンドン大学インペリアルカレッ ジの、Wyeにある宿泊施設で開催された第19回Machine Intelligence Workshop において、発表された。
本研究では、楽器の演奏やダンスなどにおけるスキルを、元々ヒトが有する複 数の反射運動の組み合わせ、すなわちシナジーによって説明するモデルの構築 を目指した。
演奏やダンスなどの技巧的なスキルを説明する理論として、我々はこれまで、 多くの筋の整合的な使われ方を規定する制約条件を用いる方法を提唱してき たが、本研究では、それをさらに押し進めて、そのような制約条件を実現する のに元々ヒトが有している反射運動をうまく利用しているのではないか、とい う仮説を設定し、その仮説を実証する方法の追求を行った。
反射運動は、神経科学的には、脊髄からの信号によって駆動される運動であ る。そのため、大脳、脳幹経由での信号のやり取りを必要とせず、状況に応じ た素早い運動を可能にしている。個々の反射運動は、学習過程を経ていないの で、単純な運動しか出来ないが、より精巧な運動は、学習過程を経て、いくつ かの反射運動を組み合わせて、シナジーとして実現されることが知られている。 そのため、もし、複雑で精巧な運動を構成する反射運動を特定できれば、その 学習プロセスの設計に役立つことが期待される。
本研究は、このような意味合いを持つ反射運動に着目して、スキルのモデル化 を目指した。そのモデル化には、従来考えられてきた定性モデルを想定してい るが、さらに、その中に確率過程を盛り込んで、ベイジアンネットワークによ るモデル化を行った。それは、身体的な動作が単一のメカニズムによって説明 できないことに対応している。
反射運動を組み込んだ運動をモデル化するために、具体例としては、これまで 取り組んできた弦楽器の弓の動きを取り上げる。そして、解剖学的知見ととも に、反射運動を組み込んだモデルの構築を試みた。モデル化の手段としては、 ベイジアンネットワークを取り上げた。
ベイジアンネットワークによる身体知のモデル化の表現を決めるためには,ベイジアン ネットワークの各ノードにどのような事象を置けばよいのかを決め,さらに,ノード間 の相互関係を決めなければならない.また,各ノードの条件確率表の確率値を決 定する必要がある.ここでは,その中で,前二者について論じる.表現を決める 上で問題となるのは,ノードに置かれる事象の複雑さである.もし,それらを命 題記号に限ると,その表現は単純になる.しかし,その場合,たとえば二つの事 象の相関が非常に強いとすると,それら二つの事象の連言をノードに置いた方が 良いかもしれない.この選択により,以下の二つの方式が考えられる.
前者は関節およびそれらにつながっている筋肉群についての特定の状態をノード とし,それらの筋骨格系に沿った関連をリンクとするので筋骨格系ベイジ アンネットワークとよび,後者はノードに置かれるリテラルの連言がある時点におけ るモデルを表すので,モデル遷移ベイジアンネットワークと呼ぶことにする.
以下に,この二つの方式のそれぞれについて,検討する.
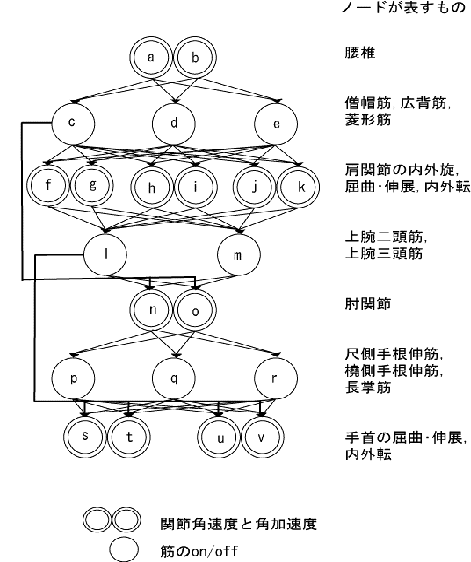
ノードに置かれるアトムは,腰から上の各関節の角速度,角加速度の状態,およ び筋肉群の活動状態である.たとえば,肩関節を考えると,(1) 腕を横に上げ る,(2) 腕を前に上げる,(3) 腕を腕方向に沿って内側,あるいは外側に回 転させる,の3種の独立した回転がある.また,肘の場合は,角度の変化は一通 りしか起こらない.もちろん,それらの状態は時間とともに変化するので,時間 変化の表現が必要である.時間的な変化は,隠れマルコフモデル(hidden Markov model, HMM)での時間軸に沿ったネットワークの構成の方法と,ある時刻でのベイジアンネット ワークから次の時間のそれへと繋げていく,動的ベイジアンネットワークの手法が知ら れている.音声認識でのHMMは,音素の系列が時間軸に沿って並ぶ構造を持っているが, ここでは,腰から指に至る一連の動作の伝播が時間軸上に並ぶことになる.また, ある関節の 動きは,必ずしも直前の筋肉群のみによって決まらず,それ以前の筋肉のモード に影響を受けるので,単純マルコフ性だけでは問題を表現出来ない.たとえば, 手首に対しては,前腕の筋肉群だけでなく上腕のそれも影響を及ぼしていること が知られている.そのため,それを超えたベイジアンネットワークの表現能力を必要と する.また,弓の動きで,下げ弓,上げ弓を繰り返す運動をこのベイジアンネッ トワークで表現しようとすると,再び同じ構造のネットワークに戻り,それが 繰り返されるこ とになる.このような構造は,動的ベイジアンネットワークに見られる.ここでは,こ の両者の表現を組み合わせる必要がある.ところが,もう一つの問題は,動的ベ イジアンネットワークのこれまでの使われ方が,次々に送られてくるセンサー情報をモ デル化している点である.すなわち,それらのシステムが相手にしているのが, 状況に応じて反応するようなリアクティブな動きであり,複雑なプランに沿った 動きは想定していない点である.そのため,ここでの目的に沿った,より複雑な 運動制御を表現するための動的ベイジアンネットワークを構築する必要がある.
もう一つの問題は,関節角と筋肉の活動の二つに,観測上の差異がある点である. 各関節角の速度,加速度は,モーションキャプチャリングシステムによって得ら れるデータから,比較的容易に計算出来るが,各筋肉の活動レベルに関しては, 表面筋電図がセンサー周辺の筋肉群の活動を加え合せたものしか計測出来ないの で,そのノードでの条件確率表を直接推定することが出来ない.そのため,ここ での筋骨格系ベイジアンネットワークでは,筋肉に対応するノードを隠れ層とみなす. そのようにして得られた,ベイジアンネットワークを図1に示す.ただし, この図では,動的ベイジアンネットワークは含まれていない.そのイメージは,この図 全体が多少の変更を加えつつ繰り返される,という構造となる.
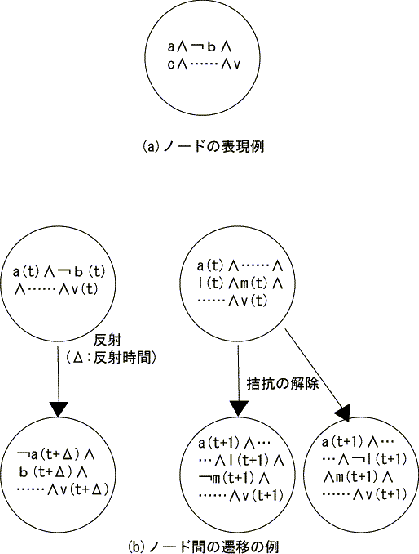
モデル遷移ベイジアンネットワークは,リテラルの連言を表現言語とする方法である. 各ノードは,ある時点で成り立っている事実を表すと考えられるので,モデルと 考えてよい.すなわち,ここでのベイジアンネットワークは,様相論理での可能世界モ デルに対応する.この表現の利点は,同時に成り立っている事柄を一つのノード で表現できる点である.たとえば,拮抗筋の利用とは,屈筋と伸筋の同時使用の ことであるが,本モデルでは,それは屈筋使用および伸筋使用が同時に成り立っ ているノードとして,自然に表現できる.他の例としては,上腕と前腕から手首 までを一体として動かすモードと鞭のように動きを伝播させるモードの区別がリ テラルの連言で表現できるので,便利である.本方法での時系列の扱いは,ある ノードから他のノードへの遷移として,表現できる.
本方式の表現例を図2に示す.図2(a)では,ノードの表現例を示す. また,図2(b)では,「反射」,および「拮抗の解除」の2例でのノード間の遷移を示す.
本方法の問題点は,もともとの結合確率モデルの設定である.各ノードのリテラ ルに時刻によるインデックス付けをすることにより,時空間での結合事象を考え ることが出来る.また,各ノードがモデルを表現するためには,フレーム問題が 発生するので,その回避も問題となる.そのために,状況計算などの手法を導入 する必要が生じてくる.表現力が豊かな分,そのための推論メカニズムが複雑に なると考えられる.
次のステップは,観測データから,実際に各ノードにおける条件確率表を求め, ベイジアンネットワークによって,さまざまな事象の確率値を予測し,それによって, 種々の仮定を検証することである.このためには,すでに手持ちのデータの他に どのようなデータが必要かを明らかにしなければならない.また,EMアルゴリズ ムや,MCMCアルゴリズムなどによって,どこまで未知の確率値を予測できるのか を調べなければならない.
具体的には,本モデル化を通して,弓の返しの複雑な動きのモデル化を実現した い.そのエッセンスは,下げ弓と上げ弓で,最適な筋骨格系のポジションが異な る,という事実である.いずれも手首によって先導されることには変わりないが, 下げ弓の場合,手首の小指側で手を引っ張るように動かし,上げ弓の場合には, 手首の親指側で手を引っ張るようにする.このため,前腕と手のなす角度が,下 げ弓と上げ弓で異なる.この,前腕と手の最適な配置を,弓の返し時に瞬間的に 達成しなければならない.より厳密に言えば,弓の方向変換に先立って,この手 の形の変化を達成しなければならない.このためにチェリストが行っていること は,手首の返しである.手首を瞬間的に返すわけである.物理学的には,この手 首の返しは,手首から先の部分の慣性運動によって達成されると考えられる.ま た,生体における運動制御においては,この瞬時の変化は,脊髄反射によって達 成されていると考えられる.このような現象を,より厳密に検証するのが,今後 の課題である.
また,より一般的には,基本構想の構築過程で,我々はベイジアンネットワーク と定性推論の関連づけの重要性を認識した.我々の現在の知識では,それらの二つを結 びつける提案を見出すことは出来なかった.この新たな研究は,今後の課題であ る.さらに,時間軸の扱いを考慮すると,より表現力の大きい,PRISMなど の確率論理プログラミングの導入も検討する価値がある.