��P�́@����
�P�D�P�D�����̐��藧���i�ȗ��j
�P�D�Q�D�����ړI
�P�D�Q�D�P�D������`
�@�����ŁA�{�������ڎw�����̂Ƃ��ẮA�A�j���[�V�����{���̈Ӗ��ɗ����߂�A��ԓI���̉f�����u�iPhysical Space Media�j�Ƃ����A�A�j���[�V�����ɂƂ��āA��莩�R�ȕ\���}�̂ɂ�����V�����\���̒T���Ƃ��̕\���̌n�ɂ�����V�����\�����Ă��邱�Ƃł���B����́A�߂������Ɏ�������邱�Ƃ����҂���闧�̉f�����f�B�A�ɂ�����V�����\����@�ւ̒�Ăɂ��Ă�����ɓ��ꂽ���̂ł���B�����āA���ʓI�ł͂Ȃ��A���̉f�����u�ɂ�����A�j���[�V�����\����@�̖͍��Ƃ��̖͍����琶�܂ꂽ�\�������ɂ������f�B�A�ƃR���e���c������s�����ƁA�����������`�Ƃ���B
�P�D�Q�D�Q�D�\���Ƃ��Ėڎw������
�@���̉f�����u�ɂ�����\���̕������Ƃ��ėl�X�ȓW�J�ƕ\���T�������҂���邪�A�{�����ɂ����Ă͊����̃A�j���[�V�����ɂ�����\����@�̓K�p�Ɋւ��Ă͌��y���Ȃ��B�܂�A���̉f�����u�ɂ�����L�����N�^�[�A�j���[�V�������@�_������̃A�j���[�V�����\���̘g�g�݂Ō�邱�Ƃ��\�ȕ\���ɂ��Ă̌����s���̂ł͂Ȃ��A�Ώۂ�����Ԃɂ����āA����̂܂܂Ɉ������Ƃɂ���ĉ\�ɂȂ鍡�܂łɂȂ��V�����\���̒T���ɂ̂ݏœ_���i��B
��Q��
�����̔w�i
�Q�D�P�D��s�����i�ȗ��j
�Q�D�Q�D�����̓����Ɖۑ�
�Q�D�Q�D�P�D�����̓���
�@�Z�p�ʂɂ����闧�̉f�����u�̌����͓��{�݂̂Ȃ炸���E�e�n�̌����@�ւɂ����ē��X�i�߂�ꂨ��A���炩�̌`�ŘI�o����@������Ă��邾�낤�B�������A��̓I�ȕ\���Ƃ����_�ɉ����ẮA��䎁�̗��̃]�[�g���[�v�ȍ~�A���s����͂�����̂̑傫�ȕ\���I�ϗe�͂Ȃ��B�܂��A�m���V���e�C�����̂悤�ȕ��������������Ă��A�A�j���[�V�����̍ŏI�I�ȃA�E�g�v�b�g���f�B�A�����ʂƂȂ��Ă��܂�����ł͕\���Ƃ��Ă�����x�Ë����s�������Ȃ��A�Ƃ����̂�����ł���B
�Q�D�Q�D�Q�D�����̉ۑ�
�@�����Ŗ{�����ł́A�����I�ɗ��̉f�����u�����f�B�A�Ƃ��ċ@�\���邱�Ƃ�z�肵���ꍇ�A���}�̉ۑ�ƂȂ�ł��낤�A�Ǝ��̕\����@�̊J���Ƃ����ۑ�Ɏ��g�ށB���̈���Ō��݁A�ėp�I�ȃ����F���ł͗B��A���̉f�����u�Ƃ��ċ@�\���Ă���]�[�g���[�v�̍\����y��Ƃ��āA�\�����f�B�A�Ƃ��Ċ��Ɍ��s�����ꂽ�ƍl�����Ă���]�[�g���[�v�ɐV��������������邱�Ƃ��O�҂Ɠ��l�A�{�����ɂ�����ۑ�Ƃ��ċ����邱�Ƃ��ł���B���̑o���̉ۑ�Ɏ��g�ޒ��ōŏI�I�ɐi���^�]�[�g���[�v �hAnima-rope�h �Ƃ��̕\���̊J�����s���B
��R��
�����T�v
�R�D�P�D�����̊T�v�ƃA�v���[�`
�R�D�P�D�P�D�����ڕW
����܂ŏq�ׂĂ����悤�ɁA�{�����ł͌���ɂ�����]�[�g���[�v�̕\���ɐV�����z�������o���Ƌ��ɁA���̕\���������I�ɗ��̉f�����u�ɂ�����Ǝ��̕\����@�Ƃ��Ċm�������邽�߂̑b��z�����Ƃ�ړI�Ƃ���B
�R�D�P�D�Q�D�����̏œ_
�@�����ɍۂ��ẮA���Ƃ��Čf����u�\���v�Ƃ��̌��ׂ̈̎���Ɛ��삪�K�v�ƂȂ�B���̐���ɂ����ẮA�M�҂��{�����̊�b�����Ƃ��čs�����A�f�U�C���v���Z�X�ɂ����鐔���I�v�l�ƁA���̓����Ɋւ���l�@���瓱���o���ꂽ�f�U�C���v���Z�X�̂��߂̉����A�u������e���V�[�v�ɗ��ӂ��Č����ƃR���e���c�����i�߂�B�����Ŗ{�������œ_�Ƃ��Ē�߂�̂͗��̉f�����u�ɂ�����Ǝ��ŐV�����\���̒�ĂƂ��̂��߂̐��엝�_�̉����𐔗���e���V�[�Ƃ����`���Œ�Ă��邱�Ƃɂ���B
�R�D�P�D�R�D�����̓����ƐV�K��
�@�{�����̐V�K���Ƃ��ẮA����̋Z�p�I���W�����������A���̉f�����u�ɂ�����\�����@�̊J����ڎw�����ƂƁA�����̗��̉f�����u�ł���]�[�g���[�v��}��邱�ƂŁA�]�[�g���[�v���̂��̂ɑ��Ă��V�������l�ς�^���Ă������Ƃ�����̂ł���B�܂��A���̐��삩�瓾��ꂽ�\���Ǝ�@�𐔗���e���V�[�Ƃ��Ē��邱�ƂŁA��ʓI�Ɂu�\���v���ׂ肪���ł��銴�o�I�Ȉ���Ȃ��Ƃ����ۑ���������A�A�N�`���A�����A�A���S���Y�~�J���Ȋϓ_����\�����@�̃K�C�h���C������邱�Ƃł���B
�R�D�P�D�S�D���҂���鐬��
�@�{�����ɂ���Ċ��҂���鐬�ʂƂ��Ă͊��q�̒ʂ�A�\���I�z���ɂ����đ��Ă��܂��Ă���]�[�g���[�v�ɕ\���Ƃ��ĐV��������������邱�ƁA�����ăA�j���[�V�������̂��̂̐V�����\�������Ƃł���B
�@�X�ɏ����I�ɁA���̉f�����u�ɂ�����\���������������ۂɁA�{���������̈�̎w�W�ƂȂ邱�Ƃ����ʂƂ��Ċ��҂������̂ł���B
�R�D�Q�D�������@
�R�D�Q�D�P�D�����̃A�v���[�`
�@�{�����ɂ�����A�v���[�`�Ƃ��ẮA�傫�����ނ��ĂR�i�K�ɕ����čs�����B��T�i�K�Ƃ��āu��b�����v�A��U�i�K�Ƃ��Ắu���p���������v�A�����đ�V�i�K�Ƃ��āu���p�����v���s�����B�ȉ��ɑ�P�i�K�����R�i�K�܂ł̊ȒP�ȗ�����������B
�R�D�Q�D�Q�D��T�i�K�F�u��b�����v
�@���̌����i�K�ł̓A�j���[�V�����̃f�U�C���v���Z�X�̂��߂̃K�C�h���C���Ƃ��ėp���邱�Ƃ�O��Ƃ����u������e���V�[�v�̒�`�t�����s���Ƌ��ɁA���ׂ̈̎���������s�����B
�R�D�Q�D�R�D��U�i�K�F�u�������p�����v
�@���̌����i�K�ł̓]�[�g���[�v�̍\���Ɋւ��čĕ��͂��s���Ƌ��ɁA���ۂ̃n�[�h�E�F�A�v���g�^�C�v�𐧍삵���BAnima-rope�쐬�Ɋւ��鎎�s����̌��ʂƂ��āAAnima-rope�v���g�^�C�vVer1.0��Ver 2.0�̐�����s�����B
�R�D�Q�D�S�D��V�i�K�F�u���p�����v
�@���̒i�K�łׂ͍��������āA�X�ɓ�̓Ɨ������������s��ꂽ�B�P��Anima-rope�v���g�^�C�v�����f�B�A�Ƃ��Ă̐V�����\���̖͍��A�����ĂQ�ڂ́A���̖͍����瓾��ꂽ���_�����Ƃɂ���Anima-rope�̎����ł���B
�R�D�Q�D�T�D�������@�̂܂Ƃ�
�@�����R�̒i�K�ɉ����Č������s������A������e���V�[�̊ϓ_�Ɋ�Â��āA����ꂽ���_�𗧑̉f�����u�ɂ�����K�C�h���C���Ƃ��Ă܂Ƃ߂��B
�X�ɁA�{�������瓾��ꂽ�l�����X�ɔ��W��������ԓI�A�j���[�V�����R���e���c�̉\���Ɍ��y�����B
��S��
��������
�S�D�P�D��b�����ɂ����鐬��
�S�D�P�D�P�D�f�U�C���v���Z�X�̃K�C�h���C��
�@�����Ɏ���܂ŁA���ɉ��x���o�ꂵ�Ă��錾�t�ł��邪�A�܂�������e���V�[�Ƃ����l�����Ɋւ��Ă����Ŗ��m�ɂ��Ă��������B���z�̃f�U�C���v���Z�X�ȂǁA�l�X�ȃf�U�C���p�����[�^�����G�ɓ���g�ݍ����f�U�C���s�ׂɂ����Đ�����ꂽ�f�U�C�������邽�߂ɁA���̗l�X�ȗv�f�𐧌䂷�邽�߂̃p�����[�^���K�v�ƂȂ�B���z�̕���ɂ����Ă͂����̐�����s�����߂̎�@��20���I�������璆���܂ł�Le Corbusier��Bauhaus�̌��z�ƁALudwig Mies van der Rohe ��ɂ���Ċm�����ꂽ�B�����̗��_�͊w��t�B�{�i�b�`��������ƂƂ������̂ŁA����ȍ~�A�\����`���p�ɂ����̉e����^�����B�����A�A�j���[�V��������ɂ����Ă̓f�B�Y�j�[��Pixar�ȂǁA�ꕔ�̃v���_�N�V��������Ċm�����ꂽ���@�_�����݂���ȊO�ɂ͋�̓I�Ƀf�U�C���v���Z�X�Ɋւ����`�͑��݂����A����ҌX�l�̕��j�Ɉς˂��Ă���B�܂��A�Î~���Ă��邪�̂ɍ\�}���d�v�Ȗ������߂�G��Ƃ͈قȂ�A���I�ł��邱�Ƃ����߂���A�j���[�V�����̃f�U�C���v���Z�X�ł̓p�����[�^�ȏ�ɁA�Ջ@���ςȑΉ������d�v�Ȗ����������Ă����B���̂悤�ȏ����݂Ɏ���܂Ōp�����Ă���v���Ƃ��ẮA����ł̃A�j���[�V�����̎�ȃA�E�g�v�b�g��@�����ʃ��f�B�A�ł���Ƃ������Ƃ���̗v���Ƃ��čl������B�Ƃ����̂́A��ɋ������\����`���p�ɂ����Č����ȌX��������ꂽ�悤�ɁA�f�U�C���v���Z�X�ɂ�����p�����[�^�͓��ɋ�ԓI�ȍ\�}�ɊW����ϐ��i�v�f�j���g���ɂ����ē��ɗL���ł��邱�Ƃ����Ď��邩��ł���B�t�̔��z���炷��A�{�������ڎw�����̉f�����u�ɂ�����A�j���[�V�������Ӗ�����Ƃ���ł���A�u�A�j���[�V�����̕��ʂ���̉���v�����݂��ۂɂ͂��̃f�U�C���v���Z�X�ɂ����ĕK�v�ƂȂ�v�f�𐧌䂷�邽�߂̃p�����[�^���L���ɋ@�\����ł��낤���Ƃ��\�z�ł���B
�S�D�P�D�Q�D������e���V�[�Ƃ����l����
�@�����ŁA�{�����ɂ������b�����Ƃ��Ă܂��A���ʓI���f�B�A�ł͂��邪�A���Ȃ��炸�\�}���ԓI�v�f���f�U�C���v���Z�X�ɗ���ł���A�j���[�V�����̐���S�ʂɂ�����f�U�C���v���Z�X�ׂ̈̑�g�Ƃ��ẴK�C�h���C����`�����݂��B�G��⌚�z�̃f�U�C���v���Z�X�����Đ����I��@���A�f�U�C���̃p�����[�^����ɖ𗧂T��ł����ɔ��I�v�f�����t������悤�ɁA�A�j���[�V�����̐���v���Z�X�ɂ����Ă����l�A�p�����[�^�̐���ɂ����Đ����I��@���L���ł���A�Ƃ�������̉��A�R�̒Z�҃A�j���[�V����������s�����B�����̃A�j���[�V�������삩�瓾��ꂽ�f�U�C���ׂ̈̃K�C�h���C���𐔗���e���V�[�Ƃ���B
�S�D�P�D�R�D��������T�F�����A�j���[�V����
�@���̎������삪�{�����ɂ�����삯�o���ƂȂ����A�j���[�V�����ł���B�e���r�̃j���[�X��V���ɂ����ėǂ��ڂɂ��銔���ł��邪�A���̊����̕ω������ɂ����A�j���[�V�����ɉ����V�����ʔ����̉\��������Ɗ����A���ۂɃA�j���[�V��������������B�v�ʌo�ϊw�ɂ����Ċ��Ƃ��Ĉ����銔���̕ω��́A�A�j���[�V��������̉ߒ��ɂ����Ă��A�j���[�V�����ɂ����鉼�z�L�����N�^�̓������`������Ƃ��ċ@�\�����B�{����ɂ����Ă͊����̕ω����瓱���o���ꂽ�����L�����N�^�[�A�j���[�V�����ɓK�p����Ƃ�����Ƃɗ��܂������A���̊������ɃL�����N�^�[�A�j���[�V�����ɂ�����L���ȕ\���iStretch, Squash�j���f�B�Y�j�[�A�j���[�V�����Ƃ͈قȂ�`���Œ�`�ł���Ƃ����\�������o�����B�o���オ�����A�j���[�V�����ł͕����������ꂽ�����f�[�^���琶�܂ꂽ����̃L�����N�^������l�q���`����Ă���B[Fig.13]
�̉E�}�͂��̋O�ՁB
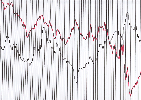
[Fig.13] �����A�j���[�V����
�S�D�P�D�S�D��������U�@�gcreative cubes�h
�@��������T�ɂ����ē���ꂽ�l�������ɁA�L�����N�^�[�A�j���[�V�����Ɋ��𗘗p����Ƌ��ɍX�ɕ��G�ȓ����̎��������݂��f���B���̃A�j���[�V�����́A�ꌩ���ʂ̃L���[�u��p�����L�����N�^�[�A�j���[�V�����ł��邪�A���̔w�i�ŁA�f���̒��œ������̑S�Ă����z�R������ԍ��W�n�ɂ����āA�ȒP�ȋɍ��W���ƎO�p���ɂ���Ē�`����Ă���B��̓I�Ȑ���ɂ����Ă�3DCG�\�t�g�E�F�AMAYA��Expression�@�\��p���ăL�����N�^���\������e���i�̊p�x�E�X�P�[���E�ʒu��xyz���W�̒l�����Œ�`�����B���̍ہA�ϐ����t���[�����[�g�Ƃ��邱�ƂŁA����(t)���p�����[�^�Ƃ��ăL�����N�^�̓����𐧌䂷�邽�߂̃K�C�h���C�����`���邱�Ƃ��\�ƂȂ����B�܂��A�f�B�Y�j�[�A�j���[�V�������[���ɂ����āA���̑�햡�ƂȂ�A�L�����N�^�[�A�j���[�V�����Z�@�̊�b�ł�����uStretch
and Squash�v�����Œ�`���邱�Ƃɂ��A���̓x���Ƌ���ɂ��ăt���L�V�u���ȑ�����\�ɂ��邱�Ƃ����������B
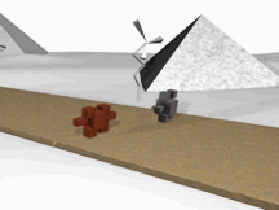
[Fig. 14]
creative cubes
�S�D�P�D�T�D��������V �gU-Bahn Berlin�h
�@���̃A�j���[�V�����́A�x�������̒n���S�H���}�Ƃ��̐��H��𑖂�ˋ�̒n���S�i�ԓ_�j�̓ʕ�Ƃ��̑��p�`��Delaunay�O�p�`�������A�j���[�g�������̂ł���B�\���I�Ɏ��݂��|�C���g�Ƃ��ẮA�����A���S���Y���̐����ߒ��ƁA�C���[�W�Ƃ��Đg�߂Ȓn���S�̘H���}��g�ݍ��킹�邱�Ƃɂ����3D�A�j���[�V�����ɂ�����A���S���Y�����`���o�������I�ȍ\�}�̔��𒊏ۓI�Ȃ������蕪����₷���`�ŕ\�����悤�Ƃ����Ƃ������Ƃł���B���̐���ɂ����Ắu�\���������I�\���v�ł��������A���ۂɂ��̗��_���f�U�C���v���Z�X���x���ɂ܂ŗ��܂���A�܂�A���S���Y������̉f���ɂ���̂ł͂Ȃ��A������e���V�[���ꎩ�̂�\���Ƃ���A�j���[�V�����Ƃ��Ďd�オ�����B
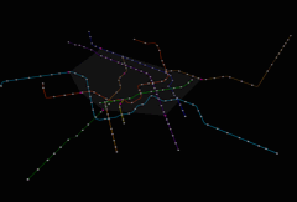
[Fig. 15] U-Bahn
Berlin
�S�D�P�D�U�D��b�����Ɛ�����e���V�[
�@�����ł͏C�m�ے��O���ɐ��삵���f���̒�������ɐ�����e���V�[�̉����𗧂Ă�Ɏ������R�{�̃A�j���[�V�������Љ���B����琧��̉ߒ��Ŋm�F�o�������Ƃ́A�����I��@���A�j���[�V��������ɂ����Đ��䂹�˂Ȃ�Ȃ������̃p�����[�^����肭���삷�邽�߂Ɋm���ɋ@�\����i�\��������j���ƁA�����ĕ\���ȊO�̕����ɂ����Đl���䂫�t����悤�ɋ@�\������̃X�p�C�X�Ƃ��Ă��@�\���邱�Ƃł���B�܂��A�\���ɒ��ځA�����I�A���S���Y���̔������������ۂɂ��A���̃A���S���Y������肭�f�U�C���v���Z�X�ɑg�ݍ��ނ��Ƃɂ���āA�\���Ƃ��ċ@�\�����邱�Ƃ��o����Ƃ��������������B�����S�Ă̌X���͉���ɂ����ԓI�v�f���܂A�j���[�V�����ł����hcreative cubes�h�ƁhU-Bahn Berlin�h�ɂ����Ă�茰���Ɋm�F���ꂽ�B�������Ȃ���A���̂R�̔����͂����܂ł�����̉f���̏�f�ɂ���ē����t�B�[�h�o�b�N�͈͓̔��ł���Ƃ������Ƃ𒍈ӂƂ��ĕt�����Ă��������B
�S�D�Q�D�������p�����i�ȗ��j
�S�D�R�D���p�����T�FAnima-rope�F�\���̖͍�
�S�D�R�D�P�D�\���̖͍��ɂ�������
�@��b�����ɂ����Đ�����e���V�[�Ƃ����l�������A�j���[�V��������ɋ@�\������Ƃ����\�������ꂽ�B������Anima-rope����Ƃ��̒��ł̐V�����\���̒T���ɍۂ��āA���̒����Ƃ��Đ�����e���V�[��O���ɒu�����Ƃɂ���āA����������s���Ƌ��ɐ�����e���V�[�̍X�Ȃ��������Ă��������B
�S�D�R�D�Q�D�\���̕������Ƃ��čl���������
�@�����ōl����ׂ��_�́A���̉f�����u�Ƃ����\�����f�B�A�A�i���^�]�[�g���[�v�����炱���\�ȐV�����\���m�ɂ��A���̍z���ɂ����Ď���ƕ\���I�͍����s���Ƃ������Ƃł���B�܂��\���͍��̎��g�݂Ƃ��ĂR�̕\�������H���A�l�@���s�����B���̕\���Ɋւ��Ĉȉ�������s���B
�S�D�R�D�R�D�\���T�F�s�\���̂Ɛ���
a) ����
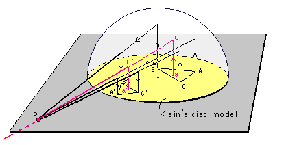
�@���̉f�����u�ȂǁA���́{�����I��Ԃ̓��F�����������V�����\���̈�ڂ̗�Ƃ��āA�s�\���́A���̓Ɠ��Ȑ��E��Ƃ����A�j���[�V�����Ƃ������̂��l�����B�{���A���_�I�ɂ�n������Ԃɂ����Ă̂ݐ����\�ƒ�`����Ă���s�\���̂ł͂��邪�A�\���I�Ȋϓ_����͗��_�����w�҃t�B�b�V���[�ɂ���ċ[���I�ɕ��ʂɎ��o������A�X�ɂ͕��c���ɂ���āu���_�Œ�v�Ƃ��������t���ł͂��邪�R��������Ԃɂ����鎋�o�����������ꂽ�B�����āA�����ł͕��c���̕s�\�}�`�̂R��������Ԃɂ����鎋�o���܂��A���̉f�����u�̓����𗘗p���ẴA�j���[�V���������݂��B
b) �\���̊g���Ɖۑ�
�@���L�Ƀf���p�ɐ��삵�����f���A�j���[�V�����̈ꕔ
[Fig.24] ���������B�����ɂ���悤�ɁA�f���͈ꌩ�A���̕s���R���Ȃ��l�Ɍ�����B�������A���ۂ͂��̒��ɕs�\���̂ł���u�o�葱����K�i�v���Č�����Ă���A���̋�Ԃ���т��ړ����Ă���B
[Fig.24] �A�j���[�V�����u�o�葱����K�i�v���
[Fig.25] �ʂ̎��_���猩���u�o�葱����K�i�v
�@�������A����͕ʎ��_����̉摜[Fig.25]�������悤�Ɏ��ۂ͐�̉摜�������悤�ȗ��̂Ƃ͂������ꂽ���^�����Ă���B�܂肱�̃A�j���[�V�����𗧑̉f�����u�ɂ����Ď��������ꍇ�A���_�ɂ���āA�قȂ�Q��ވȏ�́A���_�̂ݐ��炸�Ӗ����قȂ�f�����y���ނ��Ƃ��\�ł��邱�Ƃ������ł���B���̂Ƃ���A�����ŋ����[���_�͂��̃I�u�W�F�N�g���s�\���̂Ƃ��Č����鎋�_�i�ȉ����_A�j�ł͂Ȃ��A����ȊO�̕����ɂ���B�������ɁA���̃A�j���[�V�������f�B�X�v���C���̉f���̘g���Ȃ��ꍇ�A����ґ��͌Œ肳�ꂽ���_�ɂ����āi���̏ꍇ�I�u�W�F�N�g���s�\���̂Ƃ��Č����鎋�_�j�̂݁A�����Ȃ��A�j���[�g����Ηǂ��B�������A�ʎ��_�����������Ƃ������Ƃ�O��Ƃ������̉f�����u�ɂ�����\���ł́A���_�`�ňӐ}�I�ɋN�����������������ɉ������邩������ɂ�����ۑ�ƂȂ�B
c) �\���I�ۑ�̉���
�@���_�`�ɂ����閵���̉������@�Ƃ��āA���̗��[�����̂܂ܑтʼn������A�ڑ����Ă��܂��Ƃ������@�i�����ɂ͂Q�{�̑т̒����͐��~���قȂ�́j���Ƃ���[Fig.26-a,b]�B
 �@
�@
[Fig.26-a] ���_A�ɂ����閵���̉���
[Fig.26-b] [Fig.26-a]�����_A���猩���ꍇ
�@���āA���̖����̉������@�ł��邪�A�w�I�ϓ_����̌������݂��ꍇ�A���R�A�펯�͈̔͂ł́i���[�N���b�h�w�I�Ɂj��肪����悤�Ɍ��Ď���B�Ƃ��낪�A���̂Ƃ���͔[�N���b�h�w�ɂ����镽�s�ړ��̒�`���ł́u���_A�ɂ�������тƂ��̑��̎��_�ɂ�������т͍����v�A�����藧�B�i�Q�l�F[Fig.27]�j
[Fig.27] �o�ȓI�[�N���b�h�ɂ����镽�s�ړ�
d) �l�@
�@���̕\����ł́A���̉f�����u�ɂ����āA���̕\���̐��������ł��Ȃ���ԓI�Ȗ����A�Ƃ������_�̉����@�Ƃ��A���ʓI�ɂł͂��邪�A�[�N���b�h�w���g�p�����B����͈ȑO�̊�b�����ň�����������e���V�[�͈̔͂ł͌��y�����Ȃ���������i�܂�ȑO�͊w�̕���ɉ����Ă͊G��⌚�z�ɂ����鐔���I���@�_���l�A������e���V�[�Ƃ��ă��[�N���b�h�w�����̃��e���V�[�̈�̊�ՂƂ��Ă����j�ɂ܂ŋy�B����A��ԓI�f�����u�ɂ�����A�j���[�V�����̕\���I�f�U�C���v���Z�X�ɂ����Ĕ[�N���b�h�w����ɂ���������e���V�[���L���ł���\��������Ƃ����Ƃ������ʂ�����ꂽ�B�����莟�̂��Ƃ����藧�B
��`�P�FAnima-rope�ɂ�����f�U�C���v���Z�X�ɂ����đo�Ȑ��I�����͑ȉ~�I�[�N���b�h�w���L���ȏꍇ������B
e) �d�グ
�@���̎��_�ł͎���Ƃ������Ƃ�����A�\���I�Ȗ��n�������邱�Ƃ͔ۂ߂Ȃ����A�����܂ł͈̔͂ł̕\���I���o�̂��߂̕��@�Ƃ��Ď��_�`�ɂ����Ă̌��ʓI�\�����s�����Ƃ�ڎw���A�w�ʂɋ���z�u�����B����ɂ���Ď��_A�̕s�\���̂ɂ����閵���̏u�ԂɌ������Ƃ��ĉ����N���Ă���̂����ɔc�����邱�Ƃ��\�ɂȂ����B[Fig.28] �ɂ��̕������ɂ����Đ��삵��➑́A[Fig.29
]�ɃA�j���[�V�����p�[�c�̔z�u����������B[Fig.28 ]��12�̊e�u�[�X�́A�A�j���[�V�����̃R�}�Ɠ��l�Ɉ������Ƃ��\�ŁA�����ɂ��ꂼ��̃A�j���[�V�����p�[�c��z�u���AAnima-rope�̉�]�\�������̏�ɒu���A��]�����邱�Ƃɂ���ăA�j���[�V�������y���ނ��Ƃ��ł���B
 �@
�@
[Fig.28] �\���T�FAnima-rope➑́@[Fig.29]
�A�j���[�V�����p�[�c�̔z�u��
�S�D�R�D�S�D�\���U�F��ƉΎR
a) �ʂ̍z��
�@Anima-rope�����łɌ������\���̍X�Ȃ�͍��Ƃ��Ď��́u���`���́v�Ƃ����L�[���[�h��ݒ肵�A�\���̖͍����s�����B�]���̃]�[�g���[�v�ł͌X�ɓƗ������A�j���[�V�����p�[�c���C�ӂ̐��A�p�ӂ���A���̊e�p�[�c�̔����ȍ��ق��c�����ۂ��N�����A�A�j���[�V�����Ɍ��т��Ƃ������̂ł������B�����A�����i�߂Ă����ߒ��ŋ�̓I�ȂP�̕��݂̂̂���]�����邱�Ƃɂ���ăA�j���[�V���������邱�Ƃ��\�Ȃ̂ł͂Ȃ����Ƃ����������B�����A���̉����������\�Ȃ�u���`���́v�Ƃ������̂���������B�����ňӖ����Ă��鉼���ɂ�����u���`���́v�Ƃ́A���̂��Î~���Ă��鎞�Ɋ��Ɉ�̈Ӗ������I�u�W�F�N�g�Ƃ��Đ������Ă��邪�A�����Anima-rope�Ƃ��Ďg�p�����ꍇ�i��]�{�X�g���{�j�ɂ܂��ʂ̈Ӗ������A�j���[�V�����ƂȂ�A�Ƃ������Ƃł���B
b) �\���Ƃ��Đ��삵������
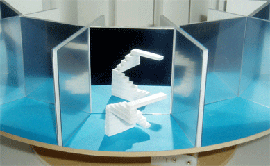
�@�O�q�̉����Ɋ�Â��Đ��삵�����̂� [Fig.30] �ł���B���̗��̑��^�͔S�y�Ő��삵�����̂ŁA�C���[�W�Ƃ��Ă̓X�L�[��Ȃǂ̕��Ⴊ�ς����Ă����Ԃ�\�������B�������A���̃I�u�W�F�N�g��Anima-rope�̉�]�\���ɃZ�b�g���A��]�����A�X�g���{���u�Ō���^����ƁA�A�j���[�V�����Ƃ��ĉΎR�̃}�O�}���ς�������悤�ȏ�i�������яオ���Ă���B����ɂ���ƉΎR�Ƃ����Ӗ��Ƃ��Ă������̃C���[�W��ÂƓ��ɂ���Ďg�������邱�Ƃ��\�ȁu���`���́v�Ƃ��ĕ\�����邱�Ƃɐ��������B

[Fig.30] �\���U�F��ƉΎR
c) ������e���V�[�̍l�@
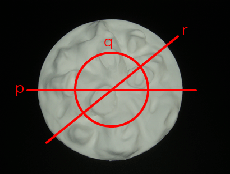
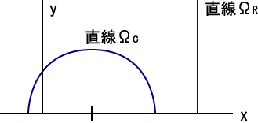
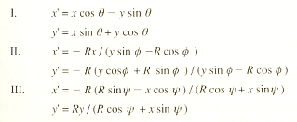
�@�u�\���U�F��ƉΎR�v�͂��̑��^��f�ނ��炵�āA���o�I�ȑ���Ő��삳�ꂽ�C���[�W���t���₷�����̂ł��邪�A���ۂɂ͎d�グ�ȑO�̒i�K�ŁA�Ȗ��Ȑ����I�l�@�Ƒ��삪�s���Ă���B���̍\���ɂ����Ăǂ̂悤�ȑ��^���s���Ύ��R�ȃA�j���[�V�����������\���Ƃ������Ƃ��l�����ꍇ�A��̉Ƃ��đ��^�̕ω���������x���炩�łȂ���Ȃ�Ȃ��Ƃ������Ƃł���B�܂葢�^�Ƃ��Ă̗��z�^��sin���̂悤�ȋN���̕ω����ł��]�܂����Ƃ������Ƃł���B�̂ɁA[Fig.31]�ɂ���悤�Ȓ����gp,q.r�h�ł��̕��̂�ؒf�����ꍇ�A����炪sin�J�[�u�ɋ߂��O�Ղ������Ƃ����z�ł���B�����Œ�`�P�ɑ���A�R�̋O�Ղ̏��������낦�邽�߂ɔ[�N���b�h�w�ɂ�镽�s�ړ��𗘗p����B����ɂ���Ēf��p,r��q�������ň������Ƃ��\�ɂȂ�B�i�Q�l[Fig.32]�j
 �@
�@
[Fig.31] �ؒf�ׂ̈̐��@�gp,q,r�h �@[Fig.32]
�o�Ȍ^�[�N���b�h��Ԃɂ����钼��
�@�X�ɂ����ŁAsin�J�[�u�̐U���̍œK�l�i�Տ�̂ǂ��ł��ψ�ȃA�j���[�V�������s�����߂̂��́j�����肷�邽�߂̎w�W�ɂ��Ă���`���Ă��������B�l����ׂ��|�C���g��Anima-rope��̔C�ӂ̓_�̒P�ʎ��Ԃ�����̈ړ������ł���B���̈ړ������͉~���̌������AAnima-rope�̉�]������̋����ɔ�Ⴕ�đ傫���Ȃ�B����āA�U���̖��x�̔䗦�ɂ��ĉ��L�̎��Œ�`�ł���B
��`�Q�F��{�U����(f)�~��]������̋���(r)
= �œK�l�i�A����{�U�����͔C�ӂ̒萔�j
���A���̎��͕\���T�^�C�v�̏ꍇ�ł̓A�j���[�V�����p�[�c�̔z�u�����肷�邽�߂̎w�W�Ƃ��ė��p�ł���B���̍ۂ̊�{�U�����́u�z�u����Ă���I�u�W�F�N�g�i�A�j���[�V�����p�[�c�j�̖��x�v�Ə�����������B
c) �A�j���[�V��������
�@���̕\���ł̓X�g���{���u��p�����t���[�����[�g����ɂ���ď�ɕω�����A�j���[�V�������y���ނ��Ƃ��ł���B����͂��̃I�u�W�F�N�g�����m�ȏ����W��K�v�Ƃ���A�j���[�V�����p�[�c�ɂ���Đ������Ă���̂ł͂Ȃ����炱���\�ȕ\���ł���B����ɂ���Đ�ɃX�g���{���u�̍��ڂɂ����ďq�ׂ������������ꂽ�B
�S�D�R�D�T�D�\���V�F���z�̋���
a) �����̏œ_
�@���ɕ\���T�A�U��ʂ���Anima-rope�ɂ�����V�����\���̍z�������o���A�c�_�����B�����ŁA�����ł͓���Anima-rope�����ł̍\�����ӎ������\����ڎw�����B�܂��A���̌��ʂ�[Fig.33]�Ɏ����B
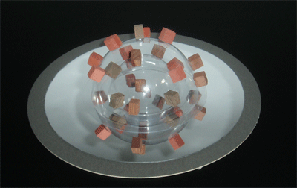
[Fig.33] �\���V�F���z�̋���
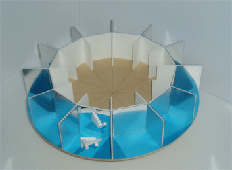
�@���̃I�u�W�F�N�g�͋��̏�ɑ傫���̈قȂ铧����������̕��̂��d�˂����̂��X�N���[���Ƃ��邱�Ƃʼn\�ɂȂ�������̐V�����^�C�v�̗��̉f�����u�ł���B���̏ꍇ�͒��F�̃u���b�N����Ԃ��삯�߂���A�j���[�V���������邱�Ƃ��ł���B
�@���̍\���ɐ�s�\����Ƃ��ďЉ���m���V���e�C�����̎�@���d�ˍ��킹�邱�Ƃ�Anima-rope�͍X�ɕ\���Ƃ��Ă̖L�����𑝂����Ƃ����҂����B
�@
b) ������e���V�[�ւ̃A�v���[�`
�@���̉f�����u�Ɍ����ẮA������Ԃ����ʂŁA���������A�j���[�V�����ׂ̗̈��p�\�ł���A�Ƃ������Ƃ���i�܂�]���̋��ʂɕ��ʂ̉f���𓊉e����̂Ƃ͈Ⴄ�j��`�T�ɑ���A�����P�����藧�B
�����T�F�ȉ~�I�[�N���b�h�w���f�U�C���v���Z�X�ɂ����鐔����e���V�[�Ƃ��ėL�p�ł��邱�Ƃ��\�������B
�S�D�S�D���p�����U�FAnima-rope�̎���
�S�D�S�D�P�DAnima-rope�̎���
�@���p�����T���瓾��ꂽ�\���I�ȉ\���Ɛ�����e���V�[�Ƃ��Ă̒�`�T�U�A�����T�Ƃ����ƂɊ�����Anima-rope�𐧍삵���B
�@����܂ł̕\����ɂ�����\���͖ړI�Ƃ��Ē�`�≼���邱�Ƃ�ړI�Ƃ��Ă������߁A���E�ς܂ł̍�荞�݂͍s��Ȃ��������AAnima-rope�����łɂ����Ă͂��̓_�ɂ����y������ŏ_�炩���\����ڎw�����B���̊����i���ȉ��ɏЉ��B
 �@
�@
[Fig.34] Anima-rope�\�������F�h�[���Ȃ�
�S�D�S�D�Q�DAnima-rope�̉��
�@�����܂œƒf�I�Ȃ��̂ł��邪�A���̑��^�������ŃA�j���[�V�������u�ƍl����l�͂��������͂Ȃ����낤�B���̑��u�͂����܂ł��̈Ӑ}�ɑ��萧�삵�����̂ŁA��ɏq�ׂ��u���`���́v�̍l���ɗR��������̂ł���B�l�����̃R���e���c�ɐڂ����Ƃ��̍ŏ��̃C���[�W���ǂ������ɗ����邱�Ƃɂ���āA�����ɍX�Ȃ�G���^�[�e�C�����g�̑�햡�����܂��̂ł���B�ȉ��AAnima-rope�̏ڍׂɂ��Ē��S���i��P�w�j���O���Ɍ������ĉ������B
��P�w�F�X
�@��]�̒��S���ɂ����ẮA��`�Q�̎��ɑ���A���u��]���̃A�j���[�V�������ʂ͂��܂���҂ł��Ȃ��B�������A������t�Ɋ������A�����Ėw�Ǎ���̂Ȃ���z�u���邱�Ƃɂ���ĕ��ɚ����X�̗l�q���Č������B
��Q�w�F�n
�@�����͊����ă]�[�g���[�v�̉����ł��镁�ʂ̗��̃A�j���[�V�����p�[�c��z�u�����B����ɂ���đ��̕\�����ۗ������邱�Ƃ�_���Ƃ��Ă���B
��R�w�F��
�@�\����Q�F��ƉΎR�ōs�����\�����A���A���X�e�B�b�N�E�H�[�^�[��p�������ׂȋN���ɉ��p���邱�ƂŁA���ۂɐ�������Ă��邩�̂悤�ȃA�j���[�V������ڂ̑O�ɋN�������Ƃɒ��킵���B
��S�w�F���ʁ^���̗r
�@���ꂼ��̗��̗r�̒��Ԃɗ����̗r�̒��Ԃ̌`���������ʂ�z�u���邱�ƂŎ���Ԃɂ����ĕ��ʂƗ��̂��s��������r�̃A�j���[�V���������������B
��w�F��
�@�����ł͕\����R�̗�̉��p�����H�����B���Ă��钹���Q�w�ɏd�˂�ꂽ�h�[���C���[�̏㉺���s�������Ȃ���A�j���[�V����������̂ł���[Fig.36]�B�����ł͒�`�T�≼���T�ɏ]���ă��C���[�̍s�����̍ۂ̃R�}�̔z�u��T�C�Y�̕ω����v�Z���Ă���B
�ŏ�w�F���\��
�X�ɃI�v�V�����ŏ�i�̊���`�ʂ��郌�C���[��lj����邱�Ƃ����ݗ\�肵�Ă���B����ɂ���ăm���V���e�C���������������悤�ȒW���Ɠ��Ȑ��E�ϕ`�ʂ�Anima-rope�ł������\�ɂȂ�B
�S�D�S�D�R�D������e���V�[�̍l�@
�@Anima-rope�̖{����ɂ����āA������e���V�[�Ɋւ��Ă͊�{�I�ɒ�`�T�E�U�Ɖ����T�Ƃ�����r�I���ۓI�ȃK�C�h���C����p����͈͂Ńf�U�C���𐋍s�����B�������h�[���\���ɂ�����A�j���[�V�����p�[�c�̍쐬��z�u�ɂ����Ă͂��[�����x���ł̔[�N���b�h�w�̊T�O���K�v�Ƃ��ꂽ�B����͎����Ȃ��Ƃł��邪�A�v���W�F�N�^�̉f�������ʂɓ��e����Ƒ傫���c��ł��܂��悤�ɁA�h�[����ɁA���ʂɃA�j���[�V�����p�[�c��z�u���Ă��܂��ƃI�u�W�F�N�g���c��ł��܂��A�����̓p�[�c�����C���[�Ԃ��ړ�����ۂ̕`�ʂɖ�肪������B�����ŁA�I�u�W�F�N�g�̌`��ʒu�̌���ɂ����āA����ߒ��Ŏ��H�������ʁA�ȉ~���[�N���b�h��ԁi�h�[���j�ƕ��ʍ��W�̍����ϊ����A�@
[Fig.37] ���L���ł���Ƃ������_�Ɏ������B���L�̎��̌`�ł͂��Ȃ����ȃC���[�W�����Ď��邪�A���G�Ȕz�u�③�^�łȂ�����ɂ����ẮA [Fig.38]
�Ɏ������C���[�W�𗝉��������Ă����Ώ[���ł��낤�B
 �@
�@
[Fig.37] �ȉ~�^�[�N���b�h��Ԃ̍����ϊ����@[Fig.38]
�ȉ~�^�[�N���b�h��Ԃƕ��ʋ�Ԃ̊W��
��T�́@����
�@�{�����ł́A���̉f�����u�ɂ�����\���̂��߂̐�������e���V�[�Ƃ��āA�[�N���b�h�w�̕K�v�����������A����̃P�[�X�X�^�f�B���s�����Ƃ��ł����B�����āA���̏��Anima-rope�̐�����s�����B���̒��Ŋ���̉\�����������Ƃ͏o�������̂́A�\���I�X�^�f�B�̐����\���ł͂Ȃ����Ƃ���A���@�_�Ƃ��Đ�������܂łɂ͎���Ȃ������B���̓_�ɂ��Ă͖{�����̐��ʂ����Ƃɍ���A���m�����Ƃ��Ď�舵���Ă��������B
�@�܂��A�X�g���{���u�P�̂Ɋւ��āA���Ɋ���̐V�����\���̉\�������o���Ă���A���̌����ΏۂƂ��Ă̏����i�K�ɓ����Ă���B����̓X�g���{���A�����ƍL���A��ԃ����F���Ŏ�����邱�ƂŁA���̋�Ԃɂ����Ă͑S�Ă��A�j���[�V��������w�A�j���[�V������ԁx�������ł���Ƃ��������ł���B����ɂ��A���悢��Physical Space Media�Ƃ��ẴA�j���[�V�����̉\�����L���邾�낤�Ɨ\�������B
�Q�l�����ꗗ
[1]
„Medien Theorie aus dem Mittelalter: Kunstgeschichte, Medientheorie,
Bildmedium�h, Horst Breadkamp, Berlin 2003�@[2] �hFUTURE CINEMA The Cinematic Imaginary after Film�h,
J. Shaw, P. Weibel, ZKM, 2003�@[3] „Computational
Geometrie�g, M. de Berg, M. van Kreveld, M. Overmars, O. Schwarzkopf, ���N�v��, �ߑ�Ȋw��, 2000 [4] �gPrinciples
of Traditional Animation Applied to 3D Computer Animation�h,
John Lasseter, Siggraph 1996 [5] �gThe Illusion of Life�h, �t�����N�E�g�[�}�X, �I�[���[�E�W�����X�g����, �X�^�W�I�W�u����, ���ԏ��X, 2002 [6] �hPädagogisches
Skizzenbuch�h, Paul Klee, Gebr. Mann Verlag, Berlin, 1997
[7] �w�|�p�ɂ����鐔�w�x, �}�C�P���E�z���g��, ���c����, �I�ɚ������X��, 2000 [8] �w���ΐ����_�x,
Albert Einastein, ���R���Y��, ��g���X [9] �gEvolved Virtual Creatures�h, Karl Sims, Computer
Graphics (Siggraph '94 Proceedings), July 1994, pp.15-22 [10] "Artful
Sceience", Barbara. M. Stafford, �Y�Ɛ}���������, 1997 [11]�@�gArt
Designer and Direkter SCAN #7���r�Y�̎d���Ǝ����h, ���r�Y, �Z�j��, 2000 [12] �w�s�\���̂̐����x, �������g,
�X�k�o��, 2005 [13] „���c�ɗY�̃g���b�N���[���h[�G�b�V���[�^��]�g, �n�E�X�e���{�X���p��, �ʔň��, ���c�ɗY, 1995
[14]
�w�w�Ƒ��Θ_�x, �����O�E���쌛�l��, �|����, 1994