はじめに
情報技術やMEMS(Micro Electro Mechanical Systems)技術の発達により、様々な研究機関やメーカにおいて小型ワイヤレスセンサノードが開発され、ユビキタスセンサネットワークが構築されようとしている。センサネットワークが整備されることにより、現実空間の環境情報の写像をサイバー空間に形成でき、コンテキストアウェアなサービスを作成できるようになる。本研究では、このようなセンサネットワーク環境において、特にセンサがアクチュエータと統合的に利用され、各センサノードが物理的に動作・移動可能なことを想定したロボティックセンサネットワークを前提として、その環境下で利用されるミドルウェアの開発を研究目的とした。ロボティックセンサネットワーク用ミドルウェアを利用することにより、開発者はより簡便にロボティックセンサネットワークアプリケーションを開発が可能になるだけでなく、これまでの静的なワイヤレスセンサノードやソフトウェアでは不可能だった新たなアプリケーションを作成できるようになった。本ページでは「ロボテッィクセンサネットワーク用ミドルウェアの研究開発」の概要と成果報告を記す。
ロボティックセンサネットワーク概要
本研究では、実空間上において動作・移動可能なアクチュエータにセンサが合体されたデバイスのことをロボティックセンサノードと呼び、複数のノードがネットワークに接続され利用される環境をロボティックセンサネットワーク環境と呼ぶ。アクチュエータとしては、モータやシリンダのような軸回転・直線運動等の一次元動作するものから、水平面上を移動可能なロボットや飛行可能なロボットなどの二次元・三次元空間を移動可能なデバイスまである。センサをアクチュエータと合体して利用するメリットの一つに、センサのセンシング領域の拡大を計れることがある。たとえば、音量センサや照度センサなどのように指向性のあるデータを取得する場合に、そのセンサの向きは非常に重要であり、そのセンサを回転させることによりセンシング範囲を格段に増やすことができる。これは温度計や湿度計などの無指向性センサにおいても、それらをシリンダなどに装着することにより、配置場所を変えセンシング領域を拡大できる。
ロボティックセンサネットワークを構築するにあたり、既存のセンサネットワーク用ミドルウェアには大きく分けて3つの問題があり、それらはデータ処理、協調処理、時空間モデルである。データ処理とは、センサデバイスとアクチュエータデバイスの双方から取得されるデータの統合的利用機構である。協調処理とは、センサとアクチュエータを統合したものを一つのロボティックセンサノードとし、それらが複数ノード存在する環境において協調的に利用する際の枠組みである。時空間モデルとは、時間の経過によりセンシング領域や被検知オブジェクトの場所が変わることにより必要になる、現実空間上の時間と空間をソフトウェア内で保持することである。これらの問題は既存のセンサネットワーク用ミドルウェアでは十分に対応しきれておらず、本研究での重点研究テーマとする。
研究構成
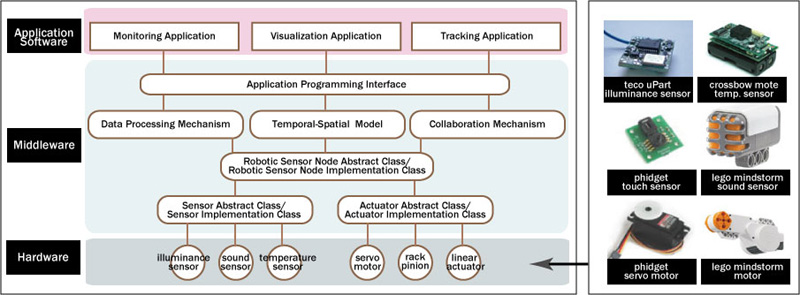
ロボティックセンサネットワーク用ミドルウェアは以下の3層から構成される。それぞれの機能について以下で説明する。
成果
本研究の研究成果として、ロボテッィクセンサネットワーク用ミドルウェアであるSpinning Sensorsツールキットを開発したとともに、以下の様な論文発表、論文投稿、プロジェクトの実施を行った。
電気情報通信学会ユビキタスセンサネットワーク研究会、2007年5月発表@東京
概要:センサノードを物理的に運動可能なロボティックアクチュエータと統合することにより,センサ自身が回
転・移動可能になり,より少ないノード数でより広いセンシング領域が検知可能になる.このようなロボティックセン
サネットワーク環境においては,多種多様なセンサとアクチュエータの抽象化問題,データ処理問題,複数ノードの
協調性の実現,時空間構造の把握等が問題になる.本稿では,ロボティックセンサネットワーク用ミドルウェアを開
発することにより,上記の問題に対する解決方法を提示するとともに,実際に4 つのロボティックセンサノードを使
用した照度と角度の関係を評価した実験を行い,ロボティックセンサネットワークの可能性について示した.
International Conference on Robot Communication and Coordination (Poster Session)、October, 2007@Athens, Greece
Abstract: Abstract.This paper proposes Spinning Sensors, a middleware
system for creating robotic sensor network applications. This
middleware enables application programmers to easily write
application software which utilizes both sensors and actuators
in their network. In the Spinning Sensors model, a sensor node
is attached to a robotic actuator to change its position and/or
direction. The continuous position change enables the single
robotic sensor node to cover greater sensing area and sensing
time. This paper describes robotic sensor node model that the
sensor and the actuator are attached together as one node, then
present our design and implementation of the software which
achieved both versatility and functionality simultaneously. We
show the result of experiment in which we utilized multiple
robotic sensor nodes to monitor the environment.
情報処理学会 論文誌 Vol.49 (3) 2008年2月採録
概要:センサをモータやロボットなどのアクチュエータに装着したロボティックセンサノード機構を実現する為に,Spinning Sensors ツールキットと呼ぶプログラミングツールキットを提案する.ロボティッ
クセンサノードを実現するには,センサとアクチュエータの協調処理を実現するだけでなく,協調動作によるセンシング範囲変化を計算する必要がある.これらの問題を即興的協調実現問題と検知範囲
把握問題として提示する.本論文では,ロボティックセンサノードのセンシングにおける時空間モデルを定義する.そしてロボティックセンサノード機構構築のためのプログラミングツールキットを提
案する.時空間モデルにおいては,センサノードとオブジェクトが動くことを想定し,センシング空間やセンシング時間とセンサノードの動作の関係についてモデリングした.また,ロボティックセン
サノード構築に必要な協調処理,データ処理,検知範囲解析処理を実現したツールキットを用いて,2 つのプロトタイプアプリケーションを実装した.さらに評価実験を行い,ロボティックセンサノー
ドの有効性を示した.Spinning Sensors ツールキットを用いてロボティックセンサノード機構を構築することにより,即興的協調実現問題と検知範囲把握問題を解決し,既存のセンサとアクチュエータ
を用いてより検知範囲が広く精度の高いセンサシステムを構築可能になる.
「センサ・アクチュエータネットワーク制御ソフトウェアの開発」、青木崇行、桐原幸彦 (2006年11月-2007年10月)