
図1:Laser Range Finder
政策・メディア研究科修士1年 グローバル環境システム
小木津 武樹
学籍番号: 80824244
近年,情報・通信技術を活用し車両と道路を知能化することで,渋滞の解消やドライバの負荷軽減,事故の減少,省エネルギーなどの問題を解決することを目的とした,ITS(Intelligent Transport Systems)という分野が様々な研究開発を活発に行っている.その中で,自動運転の手法の一つに,GPSなどの衛星測位技術を用いて自車位置情報を基に自動運転を行うものがある.GPSを用いた自動運転では,他の磁気ネイルなどの手法にくらべ,路面に敷設を必要としない,導入が容易,コストに対して有利などの長所が上げられるが,GPSによる測位を行えるエリアは,衛星からの電波を受けることのできる屋外に限られ,衛星からの電波が届かない屋内,例えばトンネルなどでは車両が不安定になるという問題がある.そこで,GPSでの測位ができない屋内でのみ,LRF(Laser Range Finder:図1)と再帰反射テープを貼り付けたポールを用いて,車両とポールの幾何学的関係による測位を行うアルゴリズムを開発した.
以下の各章では,車両とポールの幾何学的関係による測位を行う屋内測位アルゴリズムの説明,コンピュータによるシミュレーションによるアルゴリズムの評価,自動運転用に改造された小型電気自動車による実車実験による評価を行い,屋内測位アルゴリズムの有効性を確認する.
図1:Laser Range Finder
この章では,提案する屋内測位アルゴリズムについて説明する.
まず最初に,屋内測位アルゴリズムの概要に第2.1節で触れてから,屋内測位アルゴリズムを構成する,車両運動から以前検出したポールの現在の検出位置を推定するアルゴリズムと,基準点-ポール-車両間の幾何学的関係を求め,現在の車両の位置を推定するアルゴリズムを,それぞれ第2.2節と第2.3節で説明する.
2.1 屋内測位アルゴリズムの概要
本研究で提案するアルゴリズムは,屋内での車両の位置推定を目的としている.屋内の特徴として,GPSによる絶対位置の測定が出来ないことが挙げられる.GPSは前述のように,磁気ネイル等の路面に敷設するタイプのものと比べ,様々な利点がある.屋外の測位をGPSで行った場合,屋内ではGPSに代わる測位システムを構築する必要がある.屋外ではGPSや磁気ネイルを用いた自動運転システムが種々提案されているが,屋内に関しての自動運転システムの提案は比較的少ない.例えば,磁気ネイルやRFIDなどを路面に埋め込むもの,無線LANやスードライトなどの電波を用いたものがあるが,路面設置型は設置コスト,電波型はマルチパスによる測位情報の信頼性の問題などが挙げられる.そこで本研究では,再帰反射テープを貼り付けたポールを用いる手法を提案する.この手法は路面設置型でありながら,設置が比較的容易でコストも抑えることが出来る特徴を持つ.具体的には,再帰反射テープを貼り付けたポールを走行路脇に間隔をあけて設置し,それを車両に搭載したLRFにより検出し,車両とポールとの幾何学的関係を用いて測位を行う.図2のように,車両は走行する際,LRFにより逐次新しいポールを検出し,以前に検出したポールとの幾何学的関係を算出することで,新しいポールの位置を見出し,車両とポールの幾何学的関係から,現在の車両の位置を推定する.このように,本研究で提案する手法は,車両の慣性航法装置とは独立しており,車両とポールの幾何学的関係のみで車両の位置を推定する.そのため,車両の慣性航法装置から求めた車両の位置も用いて,冗長的なシステムを構成することも可能である.
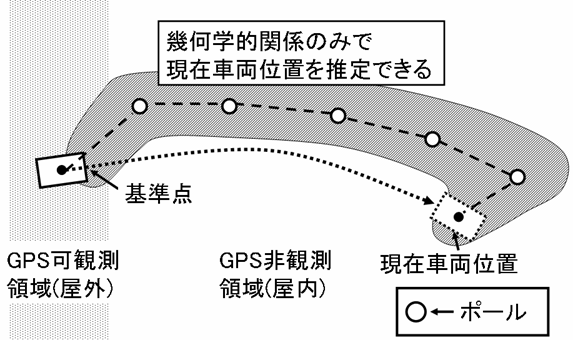
図2:屋内測位アルゴリズムの仕組み
2.2 屋内測位アルゴリズム(ポール検出アルゴリズム)
この節では,車両運動から以前検出したポールの現在の検出位置を推定するアルゴリズムについて説明する. ・・・(1)
・・・(1) ・・・(2)
・・・(2) ・・・(3)
・・・(3) ・・・(4)
・・・(4)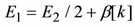 ・・・(5)
・・・(5) ・・・(6)
・・・(6) ・・・(7)
・・・(7) ・・・(8)
・・・(8)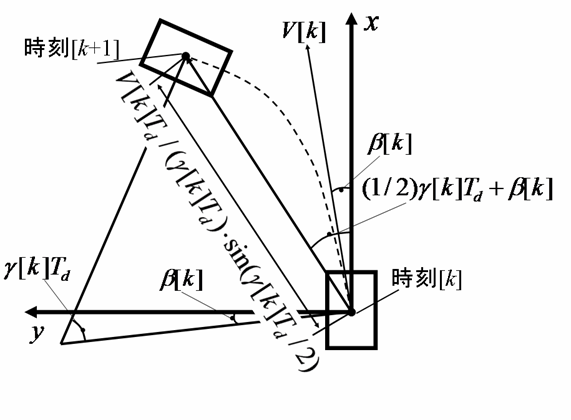
図3:車両の車両座標系での幾何学的関係
2.3 屋内測位アルゴリズム(車両位置推定アルゴリズム)
この節では,基準点-ポール-車両間の幾何学的関係を求め,現在の車両の位置を推定するアルゴリズムについて述べる. ・・・(9)
・・・(9) ・・・(10)
・・・(10) ・・・(11)
・・・(11) ・・・(12)
・・・(12) ・・・(13)
・・・(13) ・・・(14)
・・・(14) ・・・(15)
・・・(15) ・・・(16)
・・・(16)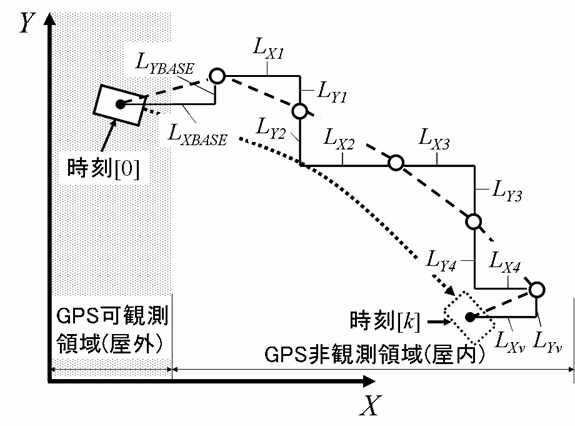
図4:車両とポールとの幾何学的関係
本研究で提案する推定アルゴリズムを用いて,三台の電気自動車による走行実験を行った.以下の節に,実験条件と実験結果について報告する.
4.1 実験条件
実験はK2タウンキャンパス敷地内の直線路で行った.実験には実験用に改造された小型電気自動車を用いた..小型電気自動車には,図5のように車両の絶対位置情報を得るためにRTK-GPSを搭載し,観測情報を得るために,LRF,速度センサ,光ファイバジャイロを搭載,車両に屋内推定アルゴリズムを計算するためのPCを搭載している.また,LRFは前方180度範囲を0.5度の分解能で観測を行うことが可能で,ポールに付いている再帰反射テープを検出することで,ポールとの相対位置および相対方位角を得ている.車両の速度を4[km]とし,走路脇に走路と平行に約5[m]間隔に置かれた5本のポールに沿って手動で走行実験を行った.屋内測位アルゴリズムに用いる重心の横滑り角はゼロとして代入している.また,車両の絶対方位角は別のアルゴリズムで求めたものを使用している.図6は実験の様子である.以下では実車実験の結果を表す.
図5:車両のシステム構成図

図6:実験風景
4.2 実験結果
実車実験の実験結果について図7に表す.図7は走行実験で屋内測位アルゴリズムで求めた車両の推定位置の誤差量と車両のと真値との誤差と,車両の速度を表している.ただし,真値には車両のRTK-GPSから得られた絶対位置情報を用いている.屋内測位アルゴリズムを用いて絶対位置を推定した場合,初期は誤差が0.07[m]と小さいものの,移動することによって誤差が最大約0.5[m]まで蓄積されていることがわかる.ただし,実験で走行した距離であれば,経験上自動運転を行うのには問題ない誤差量に収まっている.今後アルゴリズムのさらなる改良と,実際に自動運転を行って評価する必要がある.
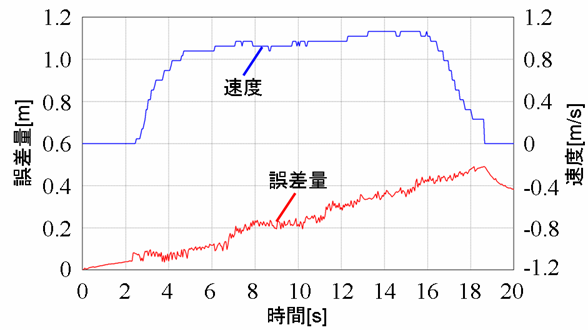
図7:実験結果
本稿では,自動運転の屋内外のシームレスな移動において,屋内の車両の位置推定アルゴリズム,推定アルゴリズムの実車実験による評価を行った.提案するアルゴリズムは,車両運動から以前検出したポールの現在の検出位置を推定するアルゴリズムと基準点-ポール-車両間の幾何学的関係を求め,現在の車両の位置を推定するアルゴリズムの二つで構成した.推定アルゴリズムの評価には,実車実験を用いた.実車実験は実験用に改造された小型電気自動車を用い,K2タウンキャンパス敷地内の直線路で行った.小型電気自動車で手動走行を行い,提案する推定アルゴリズムを導入した.実車実験によって,提案する推定アルゴリズムの有効性を明らかにした.本研究の成果は,自動運転の信頼性向上に寄与するものであると考えている.
[1] 大前 学,藤岡健彦,「DGPSを利用した絶対位置情報に基づく自動車の自動運転システムに関する研究」,日本機械学会論文集C編,Vol. 65, No. 634, (1999), pp. 2371-2378.