2014年度 森泰吉郎記念研究振興基金 年度末報告書
モータースポーツの熟練度が視線探索運動および身体運動のコーディネーションに及ぼす影響
慶應義塾大学 政策・メディア研究科
Human Performance Laboratory 所属
松本章宏
( mataki@sfc.keio.acjp )
1. 研究の目的
自動車を運転し、他
者よりも速く所定のコースを走りぬけることを目的としたスポーツをモータースポーツと呼ぶ。今日の自動車の原型はドイツのカール・ベンツの手によって
1886年に完成したと言われている。そして、人類はただちにこれをスポーツの道具として用いた。世界初の自動車レースは自動車が誕生したわずか9年後、
1895年フランスのパリ―ボルドー間にて開催されたレースであったとされている(中島,
2010)。以後、モータースポーツにはレース以外の様々なジャンルが誕生した。他車と同一のサーキットを走行し順位を競うレース、未舗装路や一般路をク
ローズドコースとして走行し、各所に設置されたチェックポイントを通過しゴールまでのタイムを競う競技のラリー、駐車場などの広いアスファルト路面にパイ
ロンを設置する事によって低速のコースを作成し、作成されたコースを走りタイムを競う競技のジムカーナなどがある。いずれの競技においてもいかに限られた
レギュレーションの中で高速に所定のコースを走行するかということが求められておりそのために自動車性能の向上やドライバーの運転技術向上が100年以上
に渡り今日まで行われてきた。本研究の目的はそのような自動車を用いたスポーツ走行時において視覚情報による入力と頭部の運動、並びにハンドル操作および
アクセル操作を中心とした運動制御による出力との間にどのような関係があるのかを明確にし、スポーツ走行運転に対する熟練度が視覚や頭部運動による入力と
身体運動としての運転操作の一連のコーディネーションに、どのような差異として生じるのかを明確化することにあった。本研究では運転の熟練度をモータース
ポーツ走行の熟練度と定め、Novice, Intermediate,
Expertの3段階に分けて検討を行った。具体的には、スポーツ走行時における視覚探索運動を実際のサーキットおよび車両を用いて走行させるリアル
フィールド実験と、レーシングシミュレーター上にて眼球運動計測装置とモーションキャプチャを併用させたうえで車両を走行させ、視線・頭部・ステアリング
における一連のコーディネーションを検討するバーチャルフィールド実験の2つを行った。これにより、運転における運動制御学習が成り立つ過程を明らかに
し、安全かつ高速に走るための視覚探索および運転操作方略を明確化する事を目的とした。本研究の成果は、日本におけるモータースポーツ走行時の安全性の向
上、および一般の高速道路走行場面において生じる車体制御不能などの単独事故の防止に寄与することが望まれる。なお、昨年度実写による検討を行ったため、
以下は本年度の研究であるレーシングシミュレーターを用いたレーシング走行時のコーディネーションに関する検討の結果を記載する。
2. 今学期行った研究概要
実車を用いた視覚探索運動における実験的検討では黒沢(2000)やKrumm(2010)らで示唆されているプロフェッショナルドライ
バーの先読み行動を計測することはできなかった。その理由として走行速度が低かったことが挙げられ、100km/h前後の低速域では時系列的に遠くの情報
を獲得し、運転のモデルをフィードフォワード制御にしなくても高速走行が可能であることを示した。そこでレーシングシミュレーターを用いた本実験では、よ
り速度を上昇させ、時系列により先の情報を獲得しなければ走行が困難な状況を作成し、よりレーシングスピードに近い状態で実験を行うことを目的とした。
また、高速状態におけるレーシング走行はタイヤプレッシャー(タイヤの中に含まれる空気圧)や気温、路面温度などに影響を受け、実験を行う条件下によって
日常的に±1秒以上の誤差が生じる。つまり、走行する車両の状態・気温などが一定でなければ計測に大きな誤差が生じてしまうため、実験条件を統制するため
にレーシングシミュレーターを用いることとした。
また、以上のように統制された環境下においてプロフェッショナルドライバーは一般ドライバーよりも時系列的に遠くの情報を得て走行しているという仮説を立
て、プロフェッショナルドライバーに一般ドライバーと同じ時系列的に近くの情報を与えた場合に運転行動がどのように変容するか検討を行うこととした。その
ため、本実験ではコーナーの内側・外側それぞれに壁を設置し、意図的に時系列的に近い情報を閲覧させる視野遮蔽条件を設定し、ハンドル操作などのパフォー
マンスが低下するか検討を行った。その際、視野遮蔽条件を実車で行うことはドライバーに対するリスクが高く、実験参加者が予期せぬ挙動を示し、自動車を破
損させてしまい、最悪の場合怪我などの負う可能性が考えられる。その点からも、安全かつ統制された環境条件を複数回用意する事を可能とするため、挙動が実
車に近いレーシングシミュレーターを構築し、実験を行うこととした。
3 研究方法
計測機器
眼球運動計測には実車内で眼球運動を計測するため、小型・軽量眼球運動計測装置EMR-9(NAC Image
Technology社製)を用いた。
また、運転動作解析には光学式モーションキャプチャシステムを用いた。計測用ソフトウェアはCortex(MotionAnalysis社製)を用い、カ
メラは光学式近赤外線カメラのRaptor-E(Motion
Analysis社製)を用いた。モーションキャプチャシステムは眼球運動計測装置と同期を行い、計測を行うため、EMR-9と同じく60Hzにて計測を
行った。マーカーの位置はHelen Hayes Hospital Marker Set(Kadaba,
1990)の位置を参考に、頭部・上腕・下肢が計測できるよう全身18箇所に設置した。
実験対象競技
昨年度行った実写実験と同じく、単独走行可能で運転に直接的に関与しない要因を排除できることからサーキットタイムアタックを対象競技とした。また、実
車実験において低速度走行が原因によりこれまで支持されていた熟達ドライバーの先読み行動が見受けられなかったと判断されたため、本実験ではより速度の高
い条件を設定した。
実験参加者
視覚と動作の双方に関するコーディネーションに関する本項は、シミュレーターにて実験を行うものの、走行速度が200km/hを超えることから、第4章
と同様にスポーツ走行経験のないNoviceドライバーを対象とした場合、走行すらままならない状態になる可能性が考えられた。また、シミュレーターを使
用した走行では、速度情報の知覚を車体や身体に発生するGから算出する事ができないため、視覚からの移動情報のみで現在の速度と道路に対する自身の車両位
置情報を把握しなければならない。以上の理由からExpertとの対照群をNovicにする事がお困難であると判断されたため、シミュレーター実験では
Expertと共にIntermediateを計測することとした。実験参加者は、Expert5名、Intermediate4名を計測した。
実験環境
通常運転に必要とされる視野角130度を確保した曲面スクリーンを新たに構築し、その円弧の中心にドライビングシート並びにハンドルコントローラー(入
力I/F)を設置する事によりドライビングシミュレーターを構築した。Figure 1に俯瞰図、Figure 2に水平方向の視野角を記した。
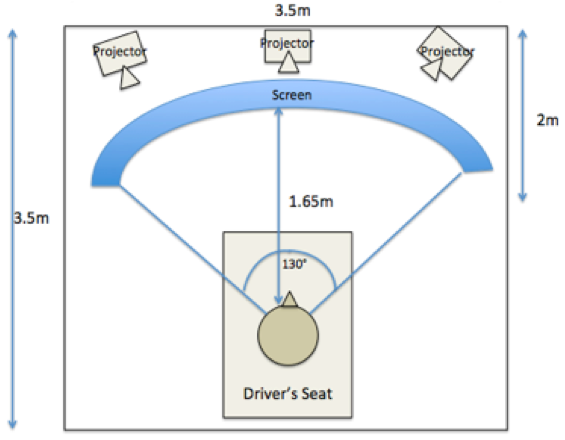
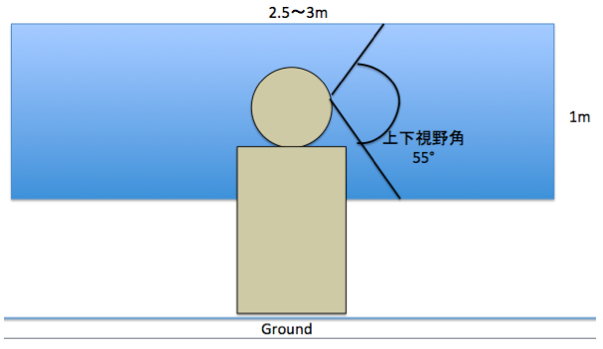 Figure 1. 新たに構築したレーシングシミュレーターの俯瞰図 Figure 2.レーシングシミュレーターの水平方向の視野角
Figure 1. 新たに構築したレーシングシミュレーターの俯瞰図 Figure 2.レーシングシミュレーターの水平方向の視野角
構築したシミュレーター設備の周りに6台の光学式近赤外線モーションキャプチャを設置し、運転操作の計測を行った。実際の計測中の様子をFigure 3に示した。
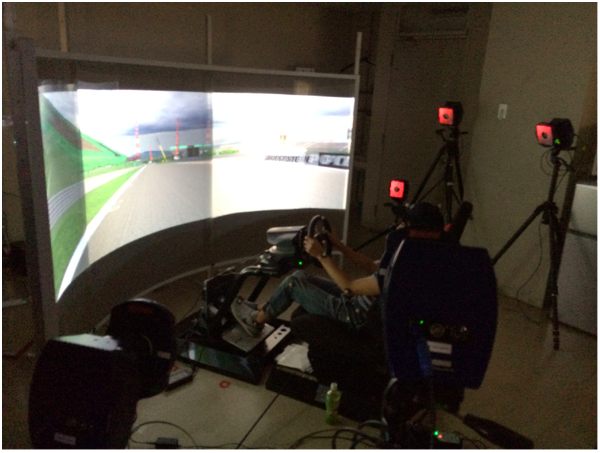 Figure 3. 新たに構築したシミュレーターと実験の様子
Figure 3. 新たに構築したシミュレーターと実験の様子
新たに構築したレーシングシミュレーター
内部のシミュレーターにおいては実際のF1選手育成にも用いられているrFactor(Image Space
Incorporated社製)を使用した。また、ドライビングにおいてステアリングから得られるステアリングインフォメーション(路面や車体の運動に対
してハンドルが取られる様子)が重要であるため、正確にステアリングインフォメーションを伝達することができるT500RS(TRUSTMASTER社
製)を使用した。
実験車両
FIA(国際自動車連盟)の規定するレーシングカー規定に則り、最もメジャーかつ高速に走行が可能な車種であるLM-GTE規格(現行GT-2規格)の
BMW M3 GT2を用いた。BMW M3
GT2は実車実験にて使用したマークXと同様の駆動方式であるFR車両であり、最も古くから存在する駆動方式であるためである。実車においても
LM-GTE規格の車両はABS(アンチロック・ブレーキ・システム)、TCS(トラクション・コントロール・システム)などの電子制御の仕様が許可され
ていることから、rFactor内においてもこれらの電子制御を作動させたまま走行させた。
実験スケジュール
フェイスシートおよび実験参加同意書に回答してもらった。実験に関する同意が得られた後、30分ほど実在する鈴鹿サーキットならびに富
士スピードウェイを走行し、ドライビングシミュレーターに慣れてもらった。また、この段階でドライビングシミュレーターに対して酔いが発生するか確認を行
い、酔いが発生した実験参加者についてはこの段階で実験から除外した。ドライビングシミュレーターに慣れた後、EMR-9およびモーションキャプチャの
マーカーを身体に取り付け、Figure4のスケジュールに行った状態でドライブしてもらった。ヘアピンコース・S字コースそれぞれにおけるオープンフィールド(以下、通常視野条件)・
クローズドフィールド(以下、視野遮蔽条件)についてはカウンタバランスした。
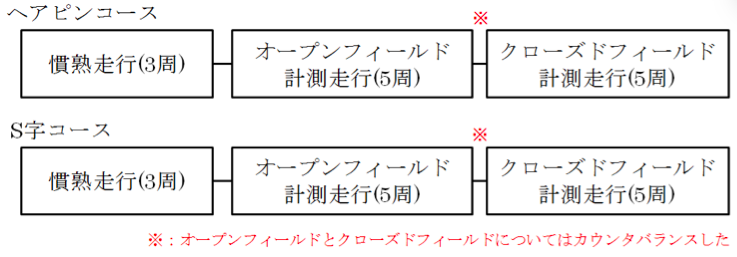 Figure 3. レーシングシミュレーターを用いた実験スケジュール
Figure 3. レーシングシミュレーターを用いた実験スケジュール
実験課題
教示は全員統一し、「自分の持てる技量の範囲内で、できるだけ早く走行して下さい。練習走行を3周行った後、本番の計測として5周してもらいます。」とした。
第3章に記した先行研究より、遠くの情報を閲覧させる事によって、ハンドルなどの操作成績が向上する事が示されている。一方で、時系列的情報における近
くの情報を与えた場合、どれほどパフォーマンスが低下するかといった実験的検討は行われていない。そこで、本実験ではコーナーの内側・外側それぞれに壁を
設置し、意図的に時系列的に近い情報を閲覧させる事によってハンドル操作などのパフォーマンスが低下するか検討を行うため、後述する2つのコースにおいて
視界に遮蔽物のない通常視野条件と、コースの内・外側に壁を設置して、時系列的に先の情報を得ることができない視野遮蔽条件を設けた。
走行コース
本実験では、Land et
al.(2001)の研究を踏襲し、ヘアピンコーナーおよびS字コーナーを対象に研究を行った。ヘアピンコーナーは単一の湾曲で構成されているため、正確
にアウト・イン・アウト走法を行いやすい。一方S字コーナーは次のコーナーを意識してコーナーの外側に対して加速しながら立ち上がりを行わなければならな
いため、ヘアピンコーナーなどと比較して難易度が高く、より「先を意識した動き」が求められる。
コースにおいては、日本に存在する鈴鹿サーキットのヘアピンコーナーおよびS字コーナーを参考に新たに作成した。それぞれのコースの俯瞰図をFigure 5およびFigure 6に示す。
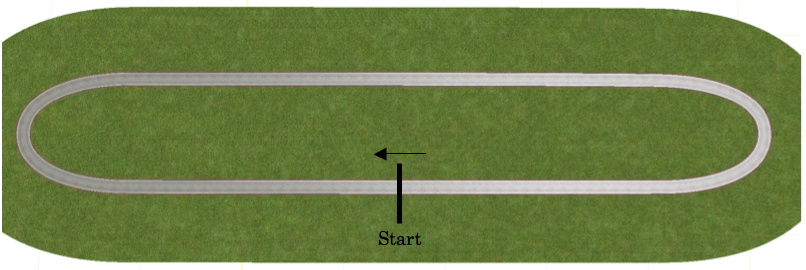 Figure 5. ヘアピンコースにおける俯瞰図
Figure 5. ヘアピンコースにおける俯瞰図
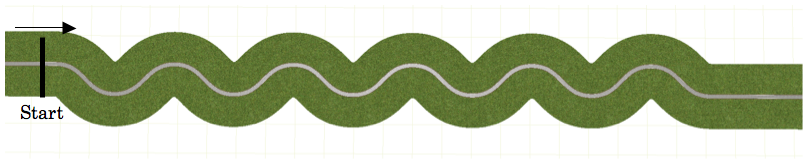 Figure 6. S字コースにおける俯瞰図
Figure 6. S字コースにおける俯瞰図
なお、ヘアピンコースにおける全長は1450m、S字コースにおける全長は2750mであってあった。ヘアピンコースの平均ラップタイムは約38秒程度、S字コースにおける平均ラップタイムは約67秒前後であった。
続いて通常視野条件走行時の様子をFigure 7に、視野遮蔽条件走行時の様子をFigure 8に示した。
 Figure 7. 通常視野条件走行時の様子
Figure 7. 通常視野条件走行時の様子
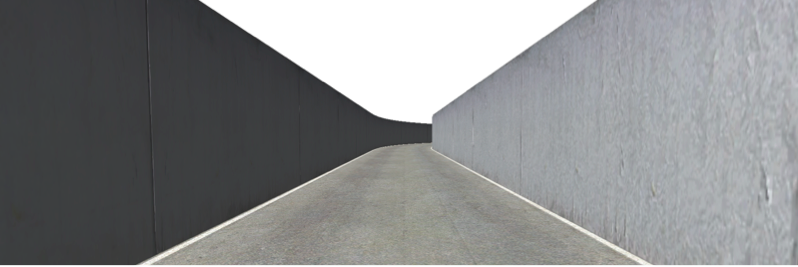 Figure 8. 視野遮蔽条件走行時の様子
Figure 8. 視野遮蔽条件走行時の様子
解析方法および分析対象区間
ヘアピンコーナーおよびS字コーナーそれぞれの走行時におけるコーナリング開始前からコーナリング終了までをフーリエ変換を行った上で全体を100%として規格化した後、視線角度・頭部角度・ステアリング角度の検討を行った。
コースの分析対象区間は、ヘアピンコースにおいては、ヘアピンが2つ繋がったオーバルコースを2つに分割し、5周分計10回の右コーナーのデータを分析
対象とした。なお、本研究においては左コーナーを分析対象としてないが、レーシングシミュレーターの設定を変更することによりドライバーが車体の中心に着
座している状態の視野を確保しているため、左右のコーナーに寄る振る舞いに違いは生じないと考えられる。そのため、本研究では右コーナーのみのデータを加
算平均し、検討を行った。
また、S字コースにおいては左右に12のコーナーが設置されている。本研究の目的が、自車の走行するコーナーのすぐ後に次のコーナーが控えている状態で
の一連のコーディネーションを計測することであるため、前後にコーナーの控えていない1・12コーナーのデータを分析対象から除外し、2から11コーナー
までのデータを加算平均した。なお、コーナーは左右各5回であるが、ヘアピンコーナー分析と同様の理由により、左右のコーナーによる見え・操作の違いが生
じないことから、左コーナーのデータを反転させ全て右コーナー走行時のデータとして処理を行い、検討を行った。
主要な実験結果の要約、ならびに考察
本研究の目的は熟練度における運転方略の差異を明らかにし、モータースポーツという超高速状態の条件下において視線・頭部・ステアリングのコーディネー
ションが熟練度によってどのように異なるかを明らかにすることであった。昨年度行った実車実験においては、Expertはオプティカルフローの最適化のみならず、車体
を確実にタンジェントポイントに到達させるために視線をイン側のパイロンへと置くという、Anchor(錨)としての役割が示唆された(Figure 9)。
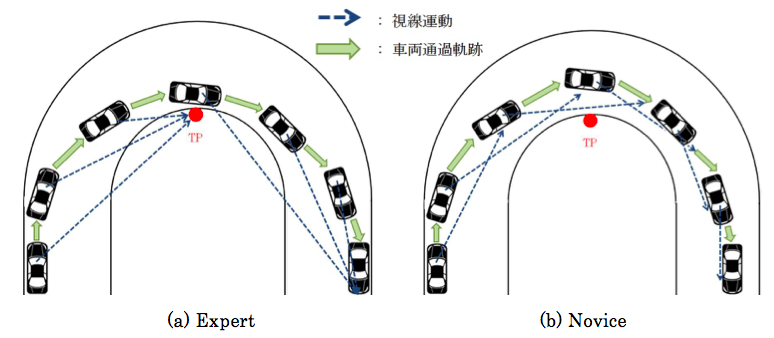 Figure 9. 単一コーナーにおける熟練度ごとの典型的な視覚探索運動と車両通過軌跡
Figure 9. 単一コーナーにおける熟練度ごとの典型的な視覚探索運動と車両通過軌跡
高速に走行する車体においては、タンジェントポイントに可能な限り接近してコーナーを通過することが最も効率的であり、結果としてラップタイムの減少に
繋がる。Noviceにおけるラップタイムの再現性が低く、走行する軌跡にばらつきがあるのは、タンジェントポイントを見逃すといった行動の結果であると
示唆される。一方で、Expertはオプティカルフローの最適化のみならず、確実にタンジェントポイントに車体を寄せながら走行することを目的にタンジェ
ントポイントをより長く的確に捉えており、その結果としてラップタイムや走行の再現性が高くなる。以上のように、モータースポーツにおいて熟達者がタン
ジェントポイントを注視し続けるのは、一般路において考察されているオプティカルフローの最適化以外にも、「高速走行する自車を確実に視点位置に近づけ、
通過する」というAnchor(錨)としての役割をしていると考えられる。
続いて、本年度行ったレーシングシミュレーターを用いた視線・頭部・ステアリングのコーディネーションの結果について総括する。タンジェントポイントに対する認知から
操作までの生起順序に関して、通常視野条件ではTime20付近で頭部を基準としてタンジェントポイントへの注視が行われていたが、視野遮蔽条件ではより
早いタイミング(Time10付近)で視覚運動を中心としてタンジェントポイントへの注視が行われていた。これらの差異はステアリング角度と頭部の回転角
度の相関係数が極めて高いという現象をもって説明できる。視野遮蔽条件では、遠くの情報をより能動的に取得しなければ両端に設置された壁によって情報が知
覚できない。そこで、よりコーナー手前段階からタンジェントポイントを見ようと視線もしくは頭部を動かすことになるが、頭部を動かすと同時にステアリング
も動かすことになる。これは頭部とステアリングの相関係数が極めて高く、ステアリングを切るためには頭部を動かし、頭部を動かすことでステアリングも切ら
れるという相互関係にあるためである。つまり、視野遮蔽条件では、眼球運動によりコーナーの内側を確認し、ステアリングとは独立した情報入力を行う必要が
あったと考えられる。一方、通常視野条件ではコーナーのタンジェントポイントの接近を周辺視で捉えれば良いため、コーナーのタンジェントポイントに向くタ
イミングが遅く(Time17)、尚且つ頭部を中心として視野をコーナーの内側へと向けることとなる。しかし、いずれの条件においても、ステアリングの操
舵が開始されるタイミングおよび頭部運動が生じるタイミングに大きな差異を見受けることができず、ブラインドコーナーのような見通しの悪い条件になると視
覚運動を中心とした情報知覚が行われることが明らかとなった(Figure 10)。
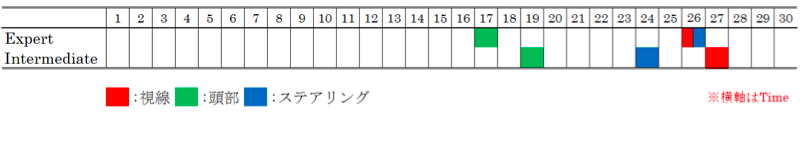
 Figure 10. 通常視野条件(上)と視野遮蔽条件(下)におけるコーナリング時のコーディネーションの生起順序
Figure 10. 通常視野条件(上)と視野遮蔽条件(下)におけるコーナリング時のコーディネーションの生起順序
具体的にはExpertは単一コーナーと同様にタンジェントポイントまでは
コーナーの内側を見るのに対し、Intermediateは頭部のコーナーの内側を見ながらも視線は外側を見るという逆位相パターンが見られた。つまり、
頭部を大きく回転させる事によってコーナーのタンジェントポイントを視認するが、視覚探索方略としては頭部の運動と相反する行動を取っており、ロスが大き
いことを示す。また、Intermediateはコーナーの出口になると急激に次のコーナーに対して頭部および視線を向けるが、Expertは
Intermediateよりもより早いタイミング(具体的には約25%前後前のタイミング)で次のコーナーに対して視野を向けていた。つまり、この動作
がこれまで通例として伝えられてきた「Expertは先を見て運転する」という現象を説明すると考えられる。Figure 11とFigure 12にExpertとIntermediateの複合コーナーにおける視覚探索運動と車両通過軌跡の典型例を示す。
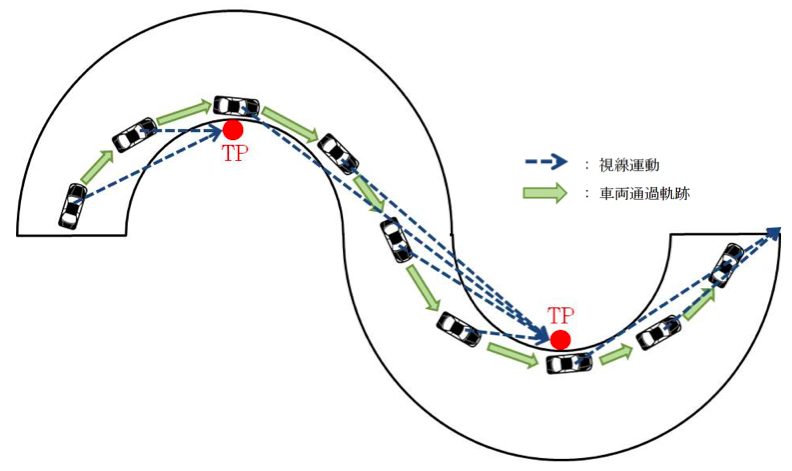 Figure 11. Expertにおける複合コーナーの典型的な視覚探索運動と車両通過軌跡
Figure 11. Expertにおける複合コーナーの典型的な視覚探索運動と車両通過軌跡
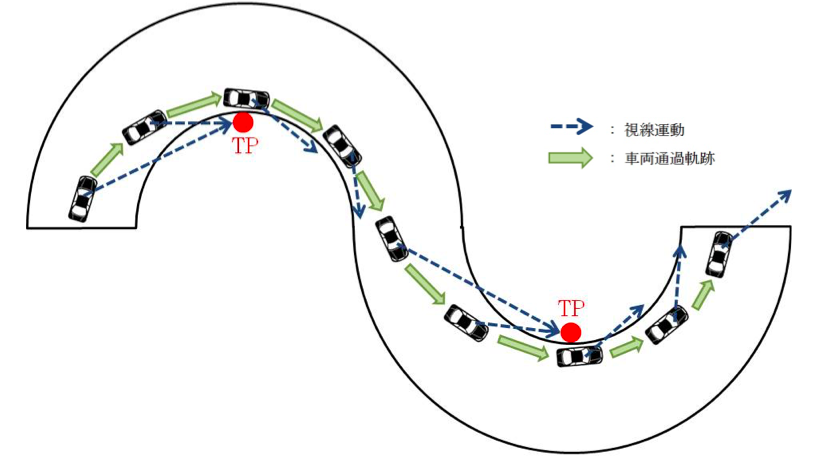 Figure 12. Intermediateにおける複合コーナーの典型的な視覚探索運動と車両通過軌跡
Figure 12. Intermediateにおける複合コーナーの典型的な視覚探索運動と車両通過軌跡
本研究における社会的応用
1 高速道路などでのブラインドコーナーに対する視覚探索的解決アプローチ
本研究結果は高速道路どでの高速走行時に応用することが可能であると考えられる。見通しの悪い峠区間などの高速道路での単独走行事故は後を絶たず、その理
由として現在はスピードの出しすぎを原因と仮定し、当該区間の法定速度低下によってその対処を行っている。しかし、当該区間における最高速度の低下が高速
道路全体におけるボトルネックとなり、渋滞が誘発されてしまうことがある。しかし、今回示された結果では、熟練度が高くなると高速走行時においても再現性
が高く、尚且つ安定した走行が行える事が示されている。つまり、現状における当該区間の事故原因を単純なスピードの出し過ぎと判断し、スピード抑制させる
事が根本的な改善となっているとは考え難い。より根本的な改善のためには、一般ドライバーに対してコーナリング時の頭部の必要以上な回転の抑制、および
コーナーが連続する地点においていかにしてドライバーに対して次のタンジェントポイントを視認させるかといった事が重要であると考えられる。そのため、本
研究結果を活かし、コーナーのタンジェントポイント通過後にフロントスクリーンに次のコーナーを意識するよう、アラートや目印などの提示を行う事でより安
全かつ、高速に走行することが出来ると考えられる。そのためには自動車前部にカメラを取り付け、画像処理技術の応用によりタンジェントポイントの自動認
識、ならびに視覚・聴覚・触覚のいかなる感覚モダリティを介してドライバーに次のコーナーを見るように促すかといった事が課題となる。
2. 熟達者の視索探索方略とコーディネーション方略の普及
モータースポーツ人口はバブルを境に大きく減少したとされるが、未だ多くの人が娯楽としてのモータースポーツ活動を行っている。しかし、モータースポー
ツは多大なコストと身体的危険を伴うスポーツであるため、1度のミスがドライバーの人生に大きな影響を当たえかねない。そのため、他のスポーツよりもプロ
フェッショナルの運転方略をエントリーレベルのドライバーにまで普及させ、短時間かつ効率的に上達するために具体的な運転方略を伝達することが重要である
といえる。その点において、現状ではプロフェッショナルドライバーの運転方略が一般ドライバーに理解されているとは言いがたく、具体的にプロフェッショナ
ルと自身のドライブの差異を理解していないユーザーが大多数である。そのため、本研究をより多くのドライバーに伝えることでエントリードライバーのドライ
ビングに対する意識が改善され、結果としてスポーツ走行中の事故減少につながると考えられる。具体的には、より多くのドライバーにこの現象を伝えるため、
走行会と呼ばれるサーキットでのスポーツ走行イベントなどでの本研究成果の発表を行うことで、本研究で得られた知見の普及につながると考えられる。
まとめ
昨年度の研究成果と本年度の研究成果をあわせ、修士論文の執筆を行った。下記のリンクより、修士論文の全文を公開する。
2014年度提出 慶應義塾大学大学院 政策・メディア研究科 松本章宏
「レーシング走行時の視覚と身体運動のコーディネーションに関する研究」
対外発表
国際学会発表
■Akihiro Matsumoto, Takaaki Kato, Hiroshi Yasuda, Yoshihiro Ohama. (2014).
Visual search behaviors and expertise of car drivers with in-situ
setting. 7th Asian-South Pacific Association of Sport Psychology
International Congress in Tokyo. Poster Session.
その他の学外発表
■SFC Open Research Forum 2013
会期:2013年11月22〜23日 開催:東京ミッドタウン ホール&カンファレンス
発表タイトル:モータースポーツの熟練度が視覚探索運動および身体運動のコーディネーションに及ぼす影響 ―運転における運動制御学習が成り立つ過程を明らかにする―
■研究成果報告会
会期:2014年2月13日 会場:豊田中央研究所
発表タイトル:熟練ドライバーの知覚運動スキルに関する研究
■認知・行動・計量セミナー
会期:2014年8月4〜6日 会場:マウントビュー箱根セミナー会場
発表タイトル:Visual search behaviors and expertise of car drivers with in-situ setting
研究費の用途
研究費の用途は、実験参加者への謝礼、レーシングシミュレーターの構築費に充てました。この場を借りて深く御礼申し上げます。
謝辞
また、レーシングシミュレーターの構築には、リアルレーシングシミュレーターショップ「 D.D.R
AKIHABARA」様のサポートにより実現をすることができました。この場をお借りし、感謝を申し上げます。また、ニッサン・モータースポーツ・インター
ナショナル(NISMO)
レーシングドライバー千代勝正様をはじめ、ニッサン・モータースポーツ・インターナショナル(NISMO)の方々には実験のご協力やインタビューなど
の意見交換で大変お世話になりました。この場を借りて深く御礼申し上げます。