森泰吉郎記念研究振興基金 成果報告書
サービスエリア内等の歩車混在環境での自動運転における歩行者の移動予測情報を用いた路車協調型速度制御に関する研究
慶應義塾大学 政策・メディア研究科 岡田成弘
1.
まえがき
本研究は,サービスエリア等を対象とした構内での自動車の自動運転における路車協調制御を提案するものである.高速道路本線走行の自動運転が実現され,その運用範囲が拡張していく場合,サービスエリアやパーキングエリア内の走行は,拡張先の有力な選択肢の一つである.利便性の向上に加え,何らかの理由で,ドライバが自動から手動に切り替えられない場合の停車場所としてのニーズもある.サービスエリア等での自動運転においては,本線走行同様,車同士の衝突を避ける必要がある上に,歩行者との衝突を避ける必要がある.また,歩行者が,駐車車両の陰に入っている場合は,車載センサによる検出が困難である可能性がある.一方で,路側の適切な位置にセンサを設置し,歩行者の検出を行なえば,走行車両から検出できない歩行者も検出できる可能性がある.すなわち,サービスエリア等の車載センサの死角が多い環境における自動運転には,路車協調が有効であると考える.
![]() 自動車と道路の協調においては,広く捉えれば,ETCやVICSなどの交通円滑化や交通情報の提供を実現するものが広く普及し,近年では,ITSスポットサービスが実用化されている.また,右折時の直進車衝突との防止,停止車両との衝突防止,歩行者との衝突防止等の安全運転支援のための路車協調の実証実験や,渋滞抑止のための情報提供,信号の表示パターンを路側から受信し効率的な走行をドライバに促す信号情報活用型運転支援システムなど,交通円滑化のための路車協調の実証実験などが行われている(1)(2).ドライバへの情報提示を対象とした路車協調において伝達される情報は,短い周期で時間変化しない確定的な情報であることが望ましい.一方,自動運転における路車協調を考えた場合,その情報については,情報を利用するものがコンピュータであることを考えると,確率的なもの(たとえば,『10%の確率で300m先に停止車両が存在する』等)であっても,運転判断・制御のための一パラメータとして有用であり,また,短い周期で時間変化しても対応することが可能である.よって,自動運転車における路車協調は,ドライバへの情報伝達を対象とした路車協調とは異なる新たな路車協調の可能性を有すると考える.
自動車と道路の協調においては,広く捉えれば,ETCやVICSなどの交通円滑化や交通情報の提供を実現するものが広く普及し,近年では,ITSスポットサービスが実用化されている.また,右折時の直進車衝突との防止,停止車両との衝突防止,歩行者との衝突防止等の安全運転支援のための路車協調の実証実験や,渋滞抑止のための情報提供,信号の表示パターンを路側から受信し効率的な走行をドライバに促す信号情報活用型運転支援システムなど,交通円滑化のための路車協調の実証実験などが行われている(1)(2).ドライバへの情報提示を対象とした路車協調において伝達される情報は,短い周期で時間変化しない確定的な情報であることが望ましい.一方,自動運転における路車協調を考えた場合,その情報については,情報を利用するものがコンピュータであることを考えると,確率的なもの(たとえば,『10%の確率で300m先に停止車両が存在する』等)であっても,運転判断・制御のための一パラメータとして有用であり,また,短い周期で時間変化しても対応することが可能である.よって,自動運転車における路車協調は,ドライバへの情報伝達を対象とした路車協調とは異なる新たな路車協調の可能性を有すると考える.
サービスエリア内等の自動運転における路車協調を考察する.サービスエリア等における歩行者の動きを考えると,自分の車から,トイレや店舗などの施設への往復の動きが多く,ある程度パターン化されていると言ってよい.歩行者の動きがある程度パターン化されている場合,路側のセンサで定点観測を行い,歩行者の移動履歴を蓄積すれば,現在の歩行者の位置,向きを,過去のその位置・向きに近い位置にあった歩行者の移動履歴と照合することで,将来時刻の歩行者の位置を予想できる可能性がある.たとえば,図1のA点の位置,向きの歩行者を検出した場合,過去に同様の位置,向きであった歩行者の3秒後位置がB点であったケースが500回あり,C点であったケースが300回あり,D点であったケースが200回だった場合,その歩行者の3秒後の位置は,50%の確率でB点,30%の確率でC点,20%の確率でD点であると予想できる.
本研究では,前述のように,路側のセンサが定点観測をしている特徴と,自動運転車が確率的な情報を活用できる特徴を用いて,サービスエリア等における自動運転のための路車協調型の速度制御を提案し,その有効性を明らかにする.本論文の構成は以下の通りである.第2章では,提案するシステムの概要を述べる.第3章では,アルゴリズムの概略を説明し,提案する制御の評価として,実験結果を報告する.
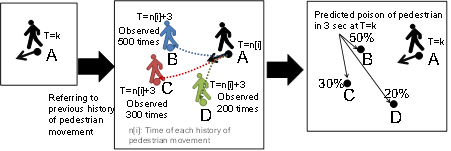
Fig.1 Movement prediction based on data of movement histories
2.
提案するシステムの概要
この章では,提案するシステムと路側・車側の処理の概要について述べる.システムの目的は,自動運転車が歩行者と衝突することなく,サービスエリア等の構内の走路を走行するための速度制御を行うことである.図2は,システムのイメージであり,図2左側が路車協調が無い場合のイメージであり,図2右側が提案するシステムである.以下では,路側の処理,車側の処理について述べる.
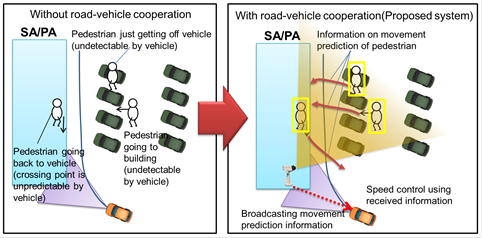
Fig.2
Illustration of proposed system
2.1 路側の処理の概要
路側の処理の目的は,歩行者を検出し,歩行者が走路上に存在する時刻とその位置の予測情報を作成し,車両に送信することである.文献(3)では,空間に存在する物体の属性から歩行者の目的地や軌跡を予測する手法が提案されているが,本研究では,過去の移動履歴を用いることで,移動予測を行う.以下では,その処理の概要を述べる.
路側のセンサと情報処理装置は,歩行者の位置を検出し,追跡を行い,各時刻における歩行者の位置を歩行者の移動履歴として蓄積する.このような移動履歴情報の蓄積があるものとして,以下では移動予測の手法を説明する.ある時刻(T=0)に図3左側のA点の位置,向きに歩行者を検出しているものとする.歩行者の向きについては,短時間の移動履歴により移動の方向を求める.次に,過去の移動履歴を検索し,この歩行者と同様の位置,向きとなる移動履歴を抽出する.ここで,移動履歴が1000件あり,移動履歴における,現在の歩行者の位置の時刻をゼロとし,時刻と位置の関係が図3左側のaの場合が500件,bの場合が300件,cの場合が200件である場合を例として説明する.aでは,時刻3〜4秒の時に歩行者が走路内のX=15mの地点に存在しており,bでは,時刻5〜7秒の時に走路内のX=10m〜8mの位置に存在しており,cでは,走路内に存在しない.a,b,cの件数が確率を表すものと考えれば,50%の確率で時刻3〜4秒にX=15mの位置に歩行者が存在し,30%の確率で時刻5〜7秒にX=10m〜8mの位置に歩行者が存在するということになる.よって,A点の歩行者を検出した時刻から将来における歩行者の移動予測は,横軸を時刻,縦軸を走路上の位置,で示すと図3右側のようになる.また,2秒後に歩行者がB点に移動した場合を図4左側に示す.この場合,移動履歴はb,cのみとなるため,移動予測は,60%(300件(b)/500件(b+c))の確率で,3〜5秒後に=10m〜8mの位置に歩行者が存在するという情報,すなわち,図4右側のように更新される.このように逐次,移動予測を更新し,歩行者が存在する時刻と位置の確率マップを移動予測情報として車両に伝達する.
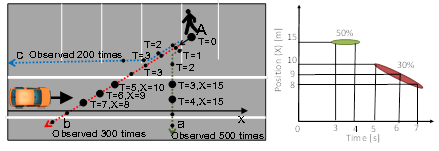
Fig.3
Movement prediction of pedestrian
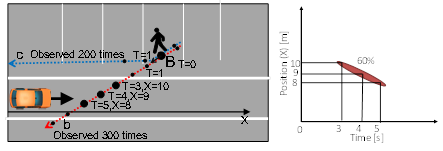
Fig.4
Update of movement prediction of pedestrian
2.2 車側の処理
車側の処理の目的は,路側から送信される移動予測情報に基づき,速度制御を行うことである.ここでは,車両は走路における自車の位置が検出できることを前提としている.図3の移動予測情報を用いた場合の例を示す.速度制御においては,歩行者との衝突確率が低い位置と時刻のパターンを求めることで,現時刻から将来の一定範囲の時間の車両速度を計画する.図5のaが,衝突確率の低い位置と時刻のパターンであり,この傾きが速度計画となる.このように,時刻と位置において,車や停止信号によって通行できない時間・位置の関係用いて速度を計画する手法は,合流(4),省エネ走行(5),グリーンウェーブ(2)(信号情報活用型運転支援(1))の研究でも報告されている.本研究においては,歩行者の移動予測情報は確率情報であり,確定情報ではないため,速度計画の際の考慮する要素の一つとして,速度計画に用いることになる.すなわち,歩行者との衝突確率を減らすだけでなく,速度変動を減らす等,歩行者衝突回避以外の要素も考慮して計画する.よって,速度変動を抑制することに大きな重みをつければ,歩行者の存在確率が大きくない場合は,図5のbのような速度計画になる.速度計画後,その速度を実現できるように車両制御を行う.また,第2.1節で述べたとおり,移動予測情は時刻と共に更新されるため,更新された移動予測情報を用いて速度計画の更新を行う.なお,移動予測情報が間違っている場合や,路側で検出されなかった歩行者が走路に存在する場合は,車載センサによる検出と制御,あるいは大きな減速度を伴う衝突防止制御により,歩行者衝突を回避することを想定している.
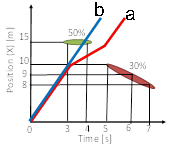
Fig.5
Speed planning based on movement prediction information
3.
アルゴリズムの概略と実車実験の結果
第2章で述べた歩行者の移動予測情報を用いた速度制御は,路側の移動予測情報を生成するための計算アルゴリズム,車側の移動予測に基づく速度計画アルゴリズムと計画した速度を実現するための速度制御アルゴリズムから実現する.それぞれのアルゴリズムの詳細は割愛する.
実装したシステムの評価として,シミュレーションによる評価と実車実験による評価を行った.以下に実車実験の様子と結果を示す.実車の評価環境として,慶應義塾大学新川崎タウンキャンパス内の駐車場敷地をサービスエリアに見立て,駐車場敷地内での走行を評価した.図6に評価に用いた走路を示す.実験車両には,操舵角,駆動力,制動力を制御可能な図7の小型電気自動車を用いている.実験車両は,路側の送信器から送られる移動予測情報を受信して,第3章で述べた速度計画および速度制御を行う.
実験車両の操舵制御については,絶対位置情報で目標コースの情報を用意し,車両に搭載された RTK-GPSと車両運動センサの情報により,目標コースとの相対位置を計測することで,自動操舵により,目標コースに追従する(6).
図8は,実験における走行結果であり,歩行者は,約25〜27秒時に,走路の約18〜19mの位置を横断している.移動予測を用いた速度計画と速度制御により,歩行者が走路を横断する前から減速し,小さな加減速で走路を走行できていることが確認できる.以上の結果により,実走行においても,路側の移動予測および,それを用いた車側の速度計画・速度制御が可能であることと,その有効性を確認した.
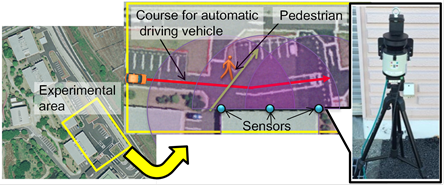
Fig.6
Environment of evaluation

Fig.7 Vehicle system
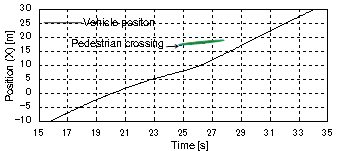
Fig.8 Experimental result (vehicle position)
参考文献
(1)自動車技術会春季大会フォーラムテキスト「近未来のITS技術 −ITS世界会議東京でのショーケースデモより―」,(2014).
(2)Hiroaki Kimura, Hirotada Otake, Haruki Oguri, Masatoshi
Kanematsu, "Results from Field Verification Tests of Green Wave Advisory
System", Proceedings of 19th ITS World Congress, (2012).
(3)Kris M. Kitani, Brian D. Ziebart, Drew Bagnell, Martial Hebert, "Activity Forecasting",
Proceedings of ECCV2012, (2012).
(4)Johnson
Jeffrey, Hauser Kris, "Optimal Longitudinal Control Planning with Moving Obstacles",
Proceedings of 2013 IEEE Intelligent Vehicles Symposium, (2013).
(5)小木津 武樹,大前 学,「周辺交通状態を考慮した進行方向速度制御の省エネルギー効果に関する研究」,自動車技術会論文集,Vol.43 No.2 , (2013), pp. 561-566.
(6)大前 学,橋本 尚久,清水 浩,藤岡 健彦,「駐車場を有する構内における自動車の自動運転の運動制御に関する研究」,自動車技術会論文集,Vol.35,No.3 , (2004), pp. 235-240.