森泰吉郎記念研究振興基金 成果報告書
自動運転制御に適応したタイヤ要求特性の研究
慶應義塾大学 政策・メディア研究科 神藏貴久
1. はじめに
昨今のITS(Intelligent Transport
Systems)技術の発展により、Google Driverless Carに代表される自動運転車両の公道走行実証実験が始まっている。自動運転の目的は、交通事故の撲滅、円滑な交通システムの構築、省エネルギー化など、自動車交通の諸問題を解決することであるが、自動運転は運転者を必要としないことから、人間の技量、判断力、体力の影響を受けないため、あらゆる環境を走り続けられる特徴もある。
次に、自動運転の将来の可能性として、高度な運動制御の実現が期待される。これは運転行動の基本である、認知、判断、操作、という3行動で考えると、人間の認知は五感のみ、また、操作は手と足の入力のみに限られる。しかし、自動運転では、車両に搭載したセンサや路面からの情報、車車間通信等を利用することで、人間以上の環境認知が可能であること、また操作では高精度で車輪を独立して駆動、制動、操舵することが可能である。そのため、自動運転は人間の運転以上の運動性能を実現できることが明らかであり、今までにない運動制御を搭載することができると考える。
一方で、視点をタイヤに移してみると、自動運転車両には、その走行を支えるタイヤに対しても、多様な環境下での走行性能を要求される。しかし、従来のタイヤは人間が運転する車両を前提として開発されるため、自動運転で想定される、今まで以上の運動性能に対し、タイヤ特性が必ずしも適応しているとは限らない。
以上から、新技術には、従来技術では十分に対応ができないこともあると考え、自動運転制御があらゆる環境で正確に、且つ車両の運動性能を最大限発揮できるよう、自動運転制御に適したタイヤ特性とはどうあるべきかを明らかにする必要があると考える。
2. 研究の目的
本研究の目的は、自動運転車両の運動性能を最大限に発揮させるため、試験車両に自動運転制御を搭載し、設計パラメータの異なる複数のタイヤにより制御適合性を検証、制御に適応したタイヤの特性、特に1次遅れ系やタイヤ剛性の影響を明らかにすることである。この実現のため複数の特性の異なるタイヤを用い、プロドライバーの規範走行を基準に自動運転制御アルゴリズムを構築、制御パラメータの調整から感度の高いパラメータを特定し、タイヤ特性と比較評価することで自動運転制御に影響するタイヤ要求特性を明らかにする。
3. 提案するシステムの概要
試験車両に日産リーフを使用し、自動運転評価車両を構築する。具体的には図1に示すように操舵を制御するためステアリングトルクセンサのアナログ信号加算回路の制作、駆動、制動制御のためアクセル、ブレーキのアナログ信号コントローラや2cm精度で自車位置の測位可能なRTK-GPSの装備、車両制御状態の把握、シフトレバー操作のためのCAN信号レシーバー、また自動運転制御のための制御PCを搭載する。
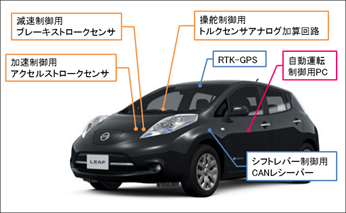
図1 評価車両改造箇所
4. 評価車両の性能評価結果
第3章で述べた評価車両を構築し、自動運転制御の性能確認のため車両運動性能が極端に低くなる極低温環境で走行評価を行った結果を図2に示す。試験環境はブリヂストン北海道プルービンググラウンドの試験路を使用させていただき実験を行った。試験時の気温は-11℃、雪上旋回路にて自動運転制御による半径30mのJターン走行を実施、車両に標準で装備されている横滑り制御装置(以下ESC)を併用した走行とし、タイヤはオールシーズンタイヤを装着している。進入速度は45km毎時と設定。これはドライ路では走行可能であるものの、試験条件の雪上で行うにはオーバースピードであり、自動運転の制御とESC制御の関係を同時に確認するためである。計測項目は車両速度(InternalVelocity)、車両目標速度(TargetVelocity)、アクセルペダル開度(GasPedal)、ブレーキストローク(BrakePedal)、操舵角(SWA)、操舵目標角度(TargetSWA)、車両前後加速度(Gx)、車両横加速度(Gy)、車両ヨーレート(YawRate-CAN)、タイヤ前後力(FL_Fx, FR_Fx)、タイヤ横力(FL_Fy, FR_Fy)、走行軌跡(Vehicle Trajectory)、走行目標軌跡(Target Path)となる。
実験結果から、速度は目標速度によく追従しているが、30秒以降、車両が旋回状態に入るとアンダーステアが発生しているためESCが作動し車両速度が強制的に低下させられていることが分かる。また、操舵角は目標角度に精度良く追従していることが確認できる。一方で走行軌跡は目標軌跡に対し旋回開始時のアンダーステアの影響により外に大きく膨らんでいるが、ESCが作動したことで最終的に目標軌跡に復帰できていることが確認できる。また、タイヤの横力は33秒〜40秒辺りまで1000N辺りを維持しており、これが試験時の最大横力であることが分かる。
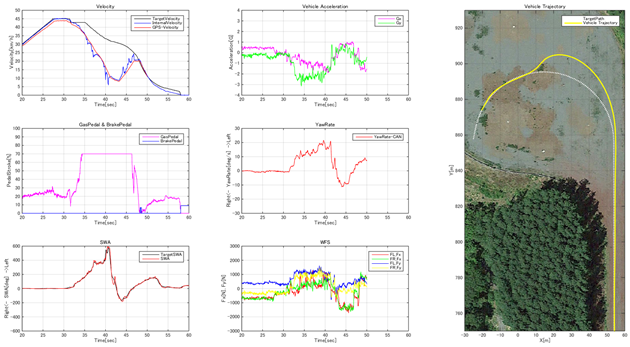
図2 走行試験結果
5. 考察と課題
以上から車両限界性能が著しく低下する極低温化での自動運転制御を確認したところ、車両標準のESC制御と協調して走行することが確認でき、自動運転の制御としても最低限の動作を行えるシステムを構築した。しかし、今回は自動運転の基本となるパスフォロー制御しか搭載しておらず、実力としてはアマチュアドライバー並みの操作しか実現できていないため、高速性、高精度という制御の特徴を活かしたシステムは実現していない。今後、ESCなど既存の車両制御と高度に協調することや、プロドライバー並みの操作を実現できる制御に改善し、それに適応するタイヤ特性を明らかにしていく予定である。