2015年度森基金研究活動報告書
研究テーマ「二値グリッドマップを用いた高精度自車位置推定」
政策・メディア研究科 松下寛治
1.研究概要
自動車の自動運転に必要な技術の一つとして、自車位置推定技術があり、万全を期すため二系統以上での位置情報の取得手段が必須といえる。位置情報取得手段の一つとしてRTK-GPS等による高度な衛星測位があるが、もう一つの代表手段である高精度地図と観測データのマッチングでは、必要な地図データが膨大であり、高負荷で時間のかかる処理が必要であった。本研究では、参照地図データを平面・非平面の二値のグリッドマップとして作成することで、地図データの圧倒的な小容量化を図り、全方位レーザーレーダーを用いた低負荷で高速な自車位置推定システムを完成させる。また処理速度を50ms以内、推定精度を20cm以内と定め、実車による実証実験を行い、当システムの有効性を評価する。
2.研究背景と着想の経緯
本学期は、プログラムの作成と、高さ情報を持つ20cmグリッドマップを用いた推定についての評価を行った。
プログラムの流れは、パーティクルのサンプリング、3次元LiDARから観測情報の取得、各パーティクルの尤度を計算し重み付け、重み付き平均による推定位置の算出、パーティクルのリサンプリングとなっている。またパーティクルのサンプリング方法については、尤度の高いサンプルが多くなる様、車両から得た速度とヨーレートを用いて毎回変更している。
近年、自動車の自動運転化技術に注目が集まっており、その中で自動車の高精度な絶対位置情報の計測は、高機能な自動運転の実現のために必須の技術である。現在自車位置計測技術の主流となっているRTK-GPSは、ビル群に囲まれた都市部や起伏の激しい山間部で測位精度が低下する問題があり、その他のセンシング機器による情報を用いた二重系以上での自車位置推定システムを構築する必要がある。例として、Google社が開発した自動運転車では全方位レーザーレーダーが使用され、メルセデス・ベンツ社の自動運転車ではカメラが使用されている。ここで用いられているシステムの詳細は明かされていないため不明であるが、Google社の自動運転車は毎秒1Gバイトのデータを処理しているといわれており、膨大なデータ量を基にした高負荷な計算を行っているものと考えられる。
私の所属する研究室では一昨年度の先行研究において全方位レーザーレーダーを使用した。その際、実験走路周辺の三次元計測を行い、二次元グリッド化した上で、グリッドごとに平面である確率を情報として持たせた独自の地図を作成した。従来の全方位レーザーレーダーを用いた自車位置推定では、様々な属性情報を含む複雑な地図情報を使用していることが計算を高負荷にしていると考えられる。そこで全方位レーザーレーダーからの計測情報と作成した地図情報に、車両から得られる車輪速センサやヨーレートセンサからの情報を用いることで、簡易ながらも高精度な自車位置推定ができるのではないかという着想に至った。
3.研究手法
本研究の研究手法と手順を以下に示す。
(1)評価環境の三次元計測点群データの収集
(2)参照地図の作成
(3)自車位置推定アルゴリズムの構築
(4)評価
(1)では、参照地図を作成するための評価環境での三次元計測点群データを収集する。評価環境となる試験場には、慶應義塾大学新川崎タウンキャンパスを想定している。全方位レーザーレーダーには、鉛直方向に32段を照射しながら水平方向に回転することで全方位計測が可能な、Velodyne社のHDL-32eを用いる。これを自動車のルーフ上部に設置し、レーザー照射による距離と反射強度、鉛直方向の照射角と水平方向の照射角を点の情報として取得する。さらに自動車上部には1cm精度での測位が可能なRTK-GPSを搭載し、点群収集時の自動車の位置と向きを記録することで、地図作成時に絶対座標への変換を可能とする。
(2)では、収集した三次元計測点群の情報を二次元グリッド情報に変換する。評価環境を20cm×20cmの平面グリッドに分割し、その中に計測されている点群の高さを評価する。平面と非平面を判断するための閾値を設定し、グリッド内での点群の高さの差が閾値以内の場合は平面グリッド、閾値以上の場合は非平面グリッドとして二値化する。下に閾値を5cmとして作成した評価環境の一部における地図を示す。平面グリッドを赤、非平面グリッドを黒として表示している。建物の屋上などの点群が得られなかったグリッドは白で表示し、自動車の制御の際は走行不可領域とする。


図.試験場の空撮写真(左:GoogleEarth)と作成した地図(右)
(3)では、パーティクルフィルタを用いた自車位置推定アルゴリズムを構築する。下に現段階で考案しているアルゴリズムのフローチャートを示す。
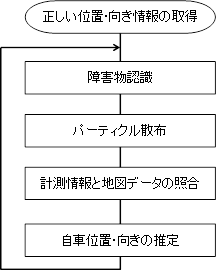
最初に、RTK-GPSから正しい位置情報と向きを取得する。その瞬間の計測情報と地図データから障害物を認識し、障害物が分布しているグリッドは後の位置推定時の地図照合に用いないようマークする。次に車両の動きに応じて現在の車両の速度とヨーレートからパーティクルの分布を決定し、散布する。計測情報と地図データの照合では、散布された各パーティクルを中心に、全方位レーザーレーダーから計測された点群情報を絶対位置座標に置き換えたグリッドマップを作成し、正確な地図データと照合する。この処理を散布した全パーティクルに施し、各パーティクルが車両のいる位置として正しい確率を尤度として記録する。各パーティクルの尤度を用いて重み付き平均を取り、算出された座標を車両の位置として推定する。再び推定された位置での計測情報と地図データとの照合によって障害物認識を行い、このようなループで断続的に自車位置を推定し続ける。
実際に自動運転車両にこのシステムを組み込む場合は、RTK-GPSによる測位情報を優先し、一定以上の誤差が見られるか情報が途絶えた場合に今回の推定手法に切り替え、RTK-GPSの情報が安定次第、再びRTK-GPSを用いた測位情報を使用する。
(4)の評価では、自己位置推定アルゴリズムについて様々なパラメータを変更することで、当システムでの処理速度、PCへの負荷、用いた地図データのデータ用量と位置推定の正確性を評価する。具体的にはパーティクルの数や分布決定項、観測データの間引き、地図データの追加や細分化などを行って評価し、それぞれ制御において最もふさわしいと考えられるパラメータを決定する。最低目標として、処理速度を50ms以内、位置推定誤差を20cm以内となることを目安として調整する。
4.実験結果
今回の実験で処理速度50ms以内であり、最も精度の高かったパラメータを以下に示す。
|
平均処理速度 |
31ms |
|
地図グリッドサイズ |
10cm |
|
パーティクル数 |
50 |
|
観測データ使用範囲 |
30m以内 |
パーティクル散布式
![]()
ここでXおよびYはパーティクルの座標、X’およびY’は前回処理時のパーティクルの座標、αは車両の向き、γは車両のヨーレートを表す。R1・R2・R5・R6は、0~6の実数を返す乱数に係数を与えたランダム値であり、R3・R4は速度とヨーレートに乗じる係数である。R1~R6の係数部分はそれぞれ
R1=0.007 R2=0.01 R3=1 R4=0.2 R5=0.01 R6=0.1
とした。
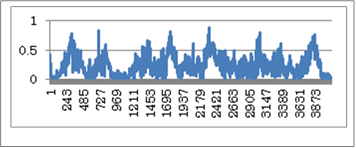
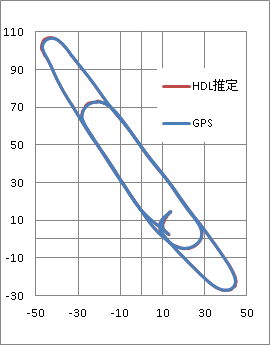
このときの結果を以下に示す。
![]()
![]()
![]()
![]()
5.考察
処理速度では目標の50msを下回ることに成功したが、推定精度には最大で85cmの差が生じた。原因は車載されたヨーレートセンサの分解能が低く、急カーブ時に有効なパーティクルを十分に撒くことができなかったためだと考えられる。地図グリッドサイズは20cmより10cmのものを使用したほうが推定精度の向上が見られたが、パーティクル数と観測データ使用範囲は今回示した値から増やしても推定精度の向上が見られなかった。また推定精度の平均誤差は約23cmで目標の20cmに近い値となっており、実車にて評価時のコースを自動運転で走行しても走路境界からはみ出すことなく走りきれることを確認した。
今後の課題として推定精度の向上が必須である。本研究ではパーティクルの散布に乱数を用い、重み付き平均を自車位置として推定した。また指導教諭が行っている研究ではパーティクルを等間隔で散布し、最も尤度の高かったパーティクルの座標を自車位置として推定する手法にて、シミュレータ上で最大誤差48cm、平均誤差7cmでの推定が可能であることがわかっている。これを実車に実装し、より最大誤差を減少させるよう取り組む。