2005年度SFC研究所プロジェクト補助研究成果報告
情報ネットワークと親和性の高い移動ロボットの開発
慶應義塾大学 大学院政策・メディア研究科 大前 学
研究成果の概要
情報ネットワーク内の一要素として稼動する移動ロボットの開発を行った.本研究における移動ロボットの特徴はIPアドレスを持ったアクチュエータとセンサを幾何的な拘束に基づき配置することで移動ロボットとしている点である.具体的には,2輪の駆動輪,1輪のキャスタ輪からなる駆動系をアクチュエータとし,周囲物体との距離を検出するレーザーレンジファインダ,周辺の映像を撮像するカメラ,鉛直軸周りの角速度を計測するジャイロをセンサとして移動ロボットを構成した.各要素に固定グローバルIPアドレスを割り当てることで,無線LAN経由で各要素の制御,モニタリングを可能した.さらに本研究では,これを情報ネットワーク上のPCから制御するために必要なインターフェース,運動制御,ロボットの稼動環境の制御機器を開発した.運動制御においては,運動制御系をロボット上に置かずに,SFC外のPCに置き,そこから制御を行っても,問題なく制御可能であることを確認した.本研究における開発により,SFC外のPCから,室内の充電装置に接続している移動ロボットを操作し,室外に出,室外を巡回し(同一フロア内),巡回後,室内の充電装置と接続するような一連の操作を可能とした.この際,室内の照明制御,ドア錠の開閉,ドアの開閉も,IPアドレスを持ったアクチュエータにより実現しているため,移動ロボットの運用者は,これらも同一のPCから制御可能である.巡回においては,カメラによる移動ロボット周りの映像の取得,マイクによる音声情報の取得が可能である.また,操作しているPCにマイクがついている場合,このマイクを利用して,移動ロボットのスピーカーから音声を発することも可能である.
本研究の成果は,情報ネットワークと機械システムの融合のSFCにおける第一歩となるものであり,本研究の成果物を核として,様々な応用を呼び込むことができると考える.本研究で開発した移動ロボットは,柔なロボット玩具ではなく,実用に絶え得る強度(積載重量200Kg以上)と大きさを有するものである.また,情報系の多くの学生が得意なインターネットを経由して制御することができる.本研究の成果物は,SFC内の様々な学生,研究者が,力学や制御,電装系構築等の障壁を感じることなく,バーチャルワールドとリアルワールドを結びつけるアイデアを具現化していくためのツールとなり,本研究期間の終了後も様々な応用研究のプラットフォームとしての役割を果たしていくことを期待している.
研究成果の詳細
1.はじめに
コンピュータと通信技術による情報通信技術(IT)は,キーボード,マウス,他のコンピュータからの情報を入力とし,音声,表示,他のコンピュータへの情報を出力として発展してきた.そして,ユビキタス化の進行の中で,入力としてのセンサ情報,すなわちセンシングが注目されてきている.その後に来るものは何か.申請者は,出力としての実空間上のモノの作動,すなわち,アクチュエーションであると考える.そして,このアクチュエーションは,あらたな社会的価値を創出するものである.情報ネットワークの中に機械システムが入り込み,社会の中に溶け込めば、移動・物流・医療・介護・製造など様々な分野での変革が起こる.
テレロボティクスという言葉がある.これは,原子炉内や被災地などの空間において,遠隔操縦において危険物のハンドリング等を行うシステムのことを指している.このような研究は,インターネットが普及する以前から活発に行われており,現在においては,外科手術等の繊細な作業等を遠隔操縦で行う技術の開発が進められている.インターネットが普及し通信技術が容易に利用できるようになった今日,インターネット経由で機械操作を行う試みも進められ,留守番ロボットや,ペットの餌やり機等,一般家庭用に実用化されているものもある.
一方,移動ロボットは,工場,港湾内の無人搬送や,ゴルフ場のカート,建設現場の自動施工等の分野で実用化されている.研究においては,自車位置の推定や,高精度な移動,マニピュレーションとの協調,障害物回避動作,群制御等のアルゴリズムなど,様々な研究成果が報告されている.
本研究の目的は,情報ネットワークと親和性の高い機械システムのあり方を明らかにするためのテストベンチとして,情報ネットワーク内の1出力として,稼動する移動ロボットの開発することである.上記の背景を鑑みると,本研究の目的には,新規性を見出し難いように見える.しかし,本研究で目指すものは,高度な遠隔操縦機器を作ることでも,移動ロボットを作ることでもない.情報ネットワークの1出力として,実空間と相互作用するシステムを開発し,その可能性を模索することである.これは,従来の技術開発の延長線上にある遠隔操縦機器や,移動ロボットとは異なり,情報技術,機械技術の新たな方向性を提示するための道具を開発することなのである.
2.移動ロボットの開発
本研究で開発した移動ロボットについて説明する.本研究における移動ロボットの特徴はIPアドレスを持ったアクチュエータとセンサを幾何的な拘束に基づき配置することで移動ロボットとしている点である.以下の各節では,まず現行のシステムの概要を説明し,その後一次試作機から,現行の移動ロボットへの改良について報告する.
2.1 開発した移動ロボットの構成の概要
図2.1.1,図2.1.2に移動ロボットの写真と構成の概要を示す.以下の各項では移動ロボットの各要素について説明する.

図2.1.1 本研究で開発した移動ロボット
図2.1.2 開発した移動ロボットの構成概要図
2.1.1 駆動系
駆動系としては2輪の駆動輪と1輪のキャスタ輪からなるものとしている.図2.1.3に駆動系の写真を示す.これは,移動ロボットを上下逆さにして,上から撮影した写真である.真ん中についている黒い装置は,AC100Vのインバータであり,ここに搭載することでスペースの有効利用と,低重心化を行っている.駆動輪の駆動にはACサーボモーターを使用している.使用したACサーボモーターの定格トルクは5Nmであり,これに50:1の減速器を経由し,車輪を駆動している.サーボモーターのコントローラは,パルス列入力により目標角を制御する仕様となっている.このため,コントローラに連続パルスを入力すればば,モーターの連続回転となり,入力パルスの周波数を制御することで,速度制御が可能となる.入力パルスの数を制御することで,位置制御が可能となる.最大速度は車輪部において60rpmであり,この場合の移動速度は2km/hとなる.ACサーボモーターに入力するパルスの生成にマイコンを使用し,マイコンへの入力には,RS232Cとイーサーネットの変換器により,TCP/IP経由での制御を可能としている.このRS232Cとイーサーネットの変換器には,固定グローバルIPを割り当てており,SFC内外に問わず,駆動用モーターを制御することを可能としている.さらに,手動での直接運転も可能とするため,図2.1.4に示すような有線式の手動コントローラを制作し取り付けている.

図2.1.3 駆動輪とキャスタ輪

図2.1.4 手動コントローラ
2.1.2 計測系
計測系としては,レーザーレンジファインダとネットワークカメラ,ジャイロを搭載している.
(1)レンジファインダ
レーザーレンジファインダは,水平方向に180度範囲にレーザーパルスを照射し,その反射波の到着時間により周囲物体間距離を計測するものである.図2.1.5に搭載したレーザーレンジファインダの写真を示す.レーザーレンジファインダを高さ25cmの位置に移動ロボットの前部に取り付けている.レーザーレンジファインダは,シリアル通信によりデータを出力するためRS232Cとイーサーネットの変換器により,TCP/IP経由での計測を可能としている.計測値は,水平方向2度刻みでのレーザー物体間距離情報である(90個1セット).このRS232Cとイーサーネットの変換器にも,固定グローバルIPを割り当てており,SFC内外に問わず,計測値を取得することを可能としている.

図2.1.5 レーザーレンジファインダ
(2)ネットワークカメラ
ネットワークカメラには,パン・チルトが制御可能でズーム機能があるものを使用した.ネットワーク経由で制御する場合,移動ロボットを後ろから俯瞰するような位置で動かすと,操作しやすいことを確認したため,後方の高い位置に取り付けている.さらにこのカメラには,マイク入力とスピーカー出力があり,映像に加え,音声のネットワーク経由でのやり取りが可能となっている.そのため,移動ロボットには,高感度マイクとアクティブスピーカーを取り付け,移動ロボット周囲の音声のモニタリングと移動ロボット周囲への音の発生を可能にしている.このネットワークカメラにも,固定グローバルIPを割り当てており,SFC内外に問わず,映像と音声を取得することを可能としている.図2.1.6にネットワークカメラの写真を示す.このネットワークカメラのマウントにスピーカー,マイクが取り付けられている.

図2.1.6 ネットワークカメラ,マイク,スピーカー
(3)ジャイロ
車両の鉛直軸周りの角速度とその積分値を計測するために,光ファイバージャイロを取り付けている.使用したジャイロはシリアル通信によりデータを出力するためRS232Cとイーサーネットの変換器により,TCP/IP経由での計測を可能としている.このRS232Cとイーサーネットの変換器にも,固定グローバルIPを割り当てており,SFC内外に問わず,計測値を取得することを可能としている.
2.1.3 電源系
電源には,12V100Ahの鉛バッテリーを2個搭載している.これを並列接続し,直流12Vから1.1kWのインバータを経由して,100Vの交流を作り出し,各機器への電源としている.インバータからの出力部にネットワークから制御可能なACタップを使用している.このACタップも固定グローバルIPを割り当てており,SFC内外から各機器への電源供給および遮断が可能としている.これにより,待機時にモーターやレーザーレンジファインダの電源を切っておいたり,マイコン等に不具合が発生した場合に電源遮断および再投入による初期化などを行うことを可能としている.また,電源の遮断により,ACタップとの通信が不可能にならないように,無線ネットワークインターフェースおよびACタップ制御装置への電源供給は常時通電状態にしている.
また鉛バッテリーへの電流供給のため,接触型充電装置を制作した.接触型充電装置については第3.3節で説明する.この接触型充電装置に移動ロボットが接触し,接触部に力がかかることにより,スイッチが入り,壁のコンセントからAC100Vが移動ロボットに流れる.移動ロボット内には充電制御装置が組み込まれており,鉛バッテリーの電圧状態・負荷状態に応じて,鉛バッテリーを充電する.
2.1.4 通信系
この移動ロボットには5個の固定グローバルIPが割り当てられており,各IPは,駆動用モーター,レーザーレンジファインダ,ネットワークカメラ,ジャイロ,ACタップに用いられている.無線LANのインターフェースを用いることにより,無線LAN環境での運用を可能としている.
2.1.5 ボディ
ボディは,形状の再変更を容易化するために市販のアングル材で構成している.寸法は53cm(幅)×53cm(奥行)×72cm(高さ)(ネットワークカメラを入れると,奥行69cm,高さ117cmとなる)である.また,駆動部に関しては,厚さ20mmのアルミ材を用いたマウントを制作し,組み付けている.これにより移動ロボットに200kg以上の積載が可能となり,今後様々な機器を取り付けていくことが可能としている.
2.2 制作の流れ
2.2.1 最初の試作機
最初の試作機では,駆動系にステッピングモーターを使用し,レーザーレンジファインダ,ネットワークカメラ,ジャイロをセンサとして取り付けたものを制作した.図2.2.1,図2.2.2に最初の試作機および駆動系の写真を示す.この際,各機器のIPアドレスは,ローカルなIPアドレスを割り当てていた.また,電源の鉛バッテリーの充電は,適宜充電器を使って手動で行うものであった.そのため,鉛バッテリーの放電を防ぐため,使用後は常に電源を遮断することが必要であった.
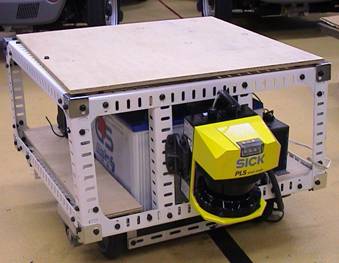
図2.2.1 最初の試作機
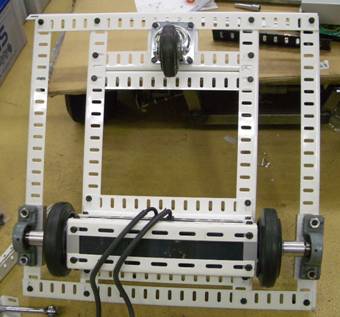
図2.2.2 ステッピングモーターを使用した駆動系
2.2.2 第一次改良
第一次改良では,以下のことを行った
・ 常時充電可能なバッテリー充電装置を取り付け,移動ロボットから伸びているコンセントを差し込んでおくことにより,常時通電状態を可能とした.
・ ネットワークカメラを取り付け,移動ロボット周囲の映像の取得を可能とした.
・ 各要素にグローバルIPを割り当て,かつ無線インターフェースを搭載することにより,SFC内外からの制御を可能とした.
図2.2.3に第一次改良後の移動ロボットの写真を示す.

図2.2.3 第一次改良後の移動ロボット
2.2.3 第二次改良
第二次改良では以下のことを行った.
・ 駆動系のステッピングモーターをACサーボモーターに換装した.これにより,脱調(モーターの空回り)の現象を回避し,さらに最大速度が0.5km/h→2km/hとなった.さらに,稼動時の静粛性,消費電力の低減も実現した.
・ 駆動系の換装に伴う寸法の縮小により,ボディの幅,奥行きを約10cm縮小した.
・ ネットワークからの制御可能なACタップを搭載し,SFC内外から各要素の電源制御を可能とした.
・ 接触型充電装置および,移動ロボット側の接触部を制作し,移動ロボットと充電装置が接触することで,充電を可能とした.これにより,移動ロボットを遠方に移動させるときに必要であった,人間によるコンセントの抜き差しを不要とした.図2.2.4に接触型充電装置の写真を示す.
・ バッテリー電圧の表示パネルを取り付け,ネットワークカメラの映像や目視によって,バッテリー状態を把握できるようにした.
・ マイク・スピーカーを搭載し,移動ロボットの周辺の音声の取得および,音声の発生を可能とした.
図2.2.5に第二次改良後の移動ロボットの写真を示す.

図2.2.4 接触型充電装置

図2.2.5 第二次改良後の移動ロボット
2.2.4 第三次改良
第三次改良では以下のことを行った.
・ 駆動系の車輪懸架構造を見直し,高荷重時でもスムーズに稼動できる構造とした.
・ 駆動系の車輪懸架構造改良に伴い,ボディの形状を変更し,機器のメンテナンスが容易な構造と機器配置にした.
・ カメラのマウントを見直し,やや後ろから移動ロボットを俯瞰できるようにした.
・ 移動ロボットの背面を扉構造とし,メンテナンスを容易にした.
図2.2.6に第三次改良後の移動ロボットの写真を示す.図2.2.7,図2.2.8に制作した駆動系の車輪懸架構造およびその構成部品を示す.図2.2.9に移動ロボットの背面の扉構造を示す.

図2.2.6 第三次改良後の移動ロボット

図2.2.7 車輪懸架構造
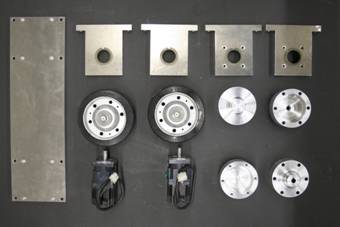
図2.2.8 車輪懸架構造の構成部品

図2.2.9 移動ロボットの背面の扉構造
3.情報ネットワーク経由での運用の利便化・容易化のための開発
この章では,開発した移動ロボットをネットワーク経由で運用していく際の利便化・容易化を実現するための開発について報告する.
3.1 手動操作用インターフェースの構築
本研究では,移動ロボットをネットワーク上のPCから手動で操作するためのインターフェースとなるソフトウェアを開発した.ソフトウェアの開発にはJAVAを用いた.このソフトウェアにより,移動ロボットのモーター,レーザーレンジファインダ,ネットワークカメラ,電源管理機器,および後述する室内の機器にアクセスし,情報の取得や移動ロボットの制御をすることが可能としている.図3.1.1に操作中の画面を示す.
図3.1.2に起動時のウインドウを示す.ここのボタンをマウスでクリックすることにより,所望の操作を行うことができる.このウインドウの各ボタンの機能は以下の通りである.
· ON Cookie:移動ロボットのモーターと接続し,前進・後退・左右回転を可能とする.なおCookieという言葉が使われている理由は,この移動ロボットの名前を「クッキー」としているためである.
· ON Camera:移動ロボット上のネットワークカメラと接続し,ネットワークカメラからの情報取得を可能とする.カメラの映像は図3.1.3のように別ウインドウに表示される.映像ウインドウの一点をクリックすると,そのクリックした場所がウインドウ中心に来るようにカメラが動く.
· ON Sensor:レーザーレンジファインダと接続し,移動ロボット周囲の物体の距離情報を取得する.周囲物体の距離情報の表示には図3.1.4のような別ウインドウが開き表示される.
· I’m home:移動ロボットが接触型充電装置付近にあるときにこのボタンを押すと,レーザーレンジファインダの情報に基づき,移動ロボットのモーターを自動制御して,移動ロボットと接触型充電装置をドッキングさせる.よって,この機能を使う場合はモーター,レーザーレンジファインダと接続している必要がある.ドッキング制御については,第3.4節にて説明する.
· Power Supply Setting...:移動ロボットのネットワーク制御機能付電源タップおよび研究室内のネットワーク制御機能付リレーと接続する.ボタンを押すと,図3.1.5のようなウインドウが表示され,各機器の電源ON・OFF,研究室内のドアの施錠開錠・ドアの開閉,照明のON・OFF,補助照明のON・OFFが制御可能となる.
· Forward, Reverse, Left, Right:ボタンを押している間,移動ロボットのモーターを制御し,それぞれ,前進・後進・左回転・右回転を行う.
· T-Up, T-Down, P-Left, P-Right, T, W:ネットワークカメラのパン・チルト・ズームを制御する.
· スライドバー:移動ロボットのモーター制御時のパルス周波数を指定する.これにより,移動ロボットの動作速度を変更することができる.
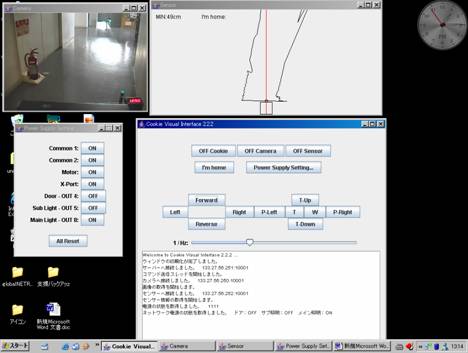
図3.1.1 すべてのウインドウを出して操作を行っている様子
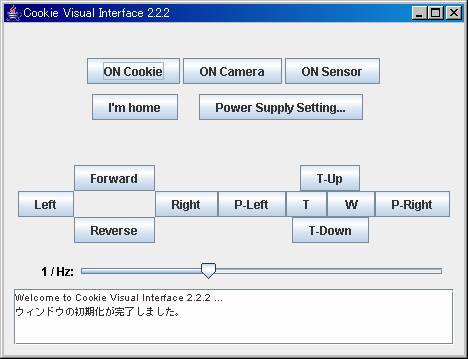
図3.1.2 メインウインドウ
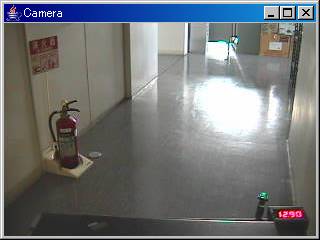
図3.1.3 カメラウインドウ
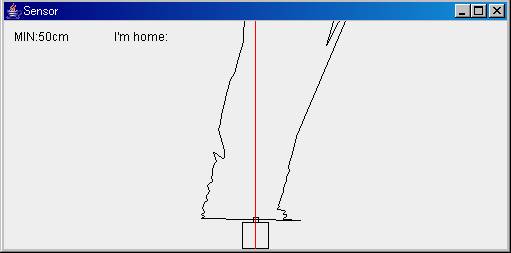
図3.1.4 レーザーレンジファインダウインドウ
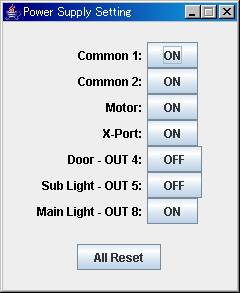
図3.1.5 電源管理ウインドウ
3.2 自動壁沿い走行制御とその評価
3.2.1 制御の概要
ネットワーク上のPCから操作して,廊下等を走行する場合,移動ロボットの方位の修正を繰り返す必要があり,操作者の負荷が大きい.本研究では,壁等が検出された場合,その壁に沿って自動走行するアルゴリズムを構築・評価した.
アルゴリズムの概要以下の通りである.稼動ロボット前方の壁の横位置を検出し,その横位置と目標オフセット量の偏差にゲインを乗ずることで目標ヨーレート(鉛直軸周りの回転角速度)とする.この目標ヨーレートを発生するための,左右輪の速度を算出し,ネットワーク上のPCから移動ロボットのモーターの制御を行う.
3.2.2 ネットワーク上のPCと制御効果の関係の評価実験
この制御は,ネットワーク上のPCから制御を行うため,ネットワーク上のPCの場所に起因する情報伝達の遅延が運動制御に影響を及ぼす可能性がある.本研究では,ネットワーク上のPCの場所と制御効果の関係を評価するための実験を行った.
実験の方法は以下の通りである.まず,移動ロボットの初期位置を壁と平行および横偏差を1mとする.この初期位置から,横偏差を一定距離とするように制御を行う.制御を行うPCの位置として,移動ロボットと同じハブにつながったPC,SFC内の有線LANにつながったPC,SFC外のネットワークにつながったPCの3つを評価した.図3.2.1,図3.2.2に,各場合の移動ロボットの軌跡および,目標ヨーレートを示す.実験結果を見ると,各PCによる制御において,移動ロボットの運動および制御出力にほとんど差はないことがわかる.一般に,システムの情報伝達遅延により制御が不安定となる場合,運動が振動的になるため,軌跡,目標ヨーレートが振動的になる.すなわち,実験結果における横方向距離,目標ヨーレートが収束しない.この結果を見ると,各PCによる制御結果にほとんど差がなく,かつ横方向距離,目標ヨーレート共に一定値に収束しているため,移動ロボットの運用においては,運動制御を行うPCが移動ロボットの外に存在しても問題がないことを確認することができた.なお,軌跡において制御開始時に外側に振れている理由は,移動ロボットの後端の軌跡を取っており,壁に近づく運動の際の転回において,後部が外側に振られたためである.
図3.2.1 移動ロボットの軌跡
図3.2.2 移動ロボットの目標ヨーレート
3.2.3 自動壁沿い走行制御による操作への影響評価
自動壁沿い走行制御を用いた場合と用いない場合の操作の違いを確認するための実験を行った.ι棟2Fのフロアを壁沿い走行制御を使って1周した場合と壁沿い走行制御を使わず1周した場合の操作回数,周回時間を評価した.
実験の方法は以下の通りである.右の壁沿い走行制御ボタン,左の壁沿い走行制御ボタン,右90度旋回ボタン,左90度旋回ボタン,および,前進,後進,右旋回,左旋回ボタンを用意し,それぞれの制御を割り付ける.すべてのボタンを使用してよい場合は,壁沿い走行制御の使用時とし,前進,後進,右旋回,左旋回ボタンをのみを使ってよい場合を壁沿い走行制御の不使用時とする.なお,壁沿い走行制御においては,壁が途切れるところで自動停止するようになっている.
表3.2.1は使用時,不使用時の結果であり,壁沿い走行を用いることで,操作回数の減少,周回時間の減少が実現できることが確認できた.
表3.2.1 壁沿い走行制御使用時の効果
|
|
操作回数 |
周回時間[s] |
|
壁沿い走行制御不使用時 |
32 |
284 |
|
壁沿い走行制御使用時 |
11 |
274 |
3.3 接触型充電装置の開発
移動ロボットの機能をネットワーク経由で利用できるようにするためには,常時通電を行っておく必要がある.コンセントによる電力供給では,移動時の障害となる.一方で,バッテリーの電力を利用する場合,バッテリー切れが問題となる.そこで本研究では,接触型充電装置を構築し,移動ロボット非稼動時の常時通電と,移動時の障害・バッテリー切れの問題の克服を行った.
移動ロボットが図3.3.1のように研究室に設置された接触型充電装置に接触すると,壁コンセントからの電力が移動ロボットに供給される.図3.3.2に接触時の写真を示す.ロボットの非稼動時は,この状態を保っている.移動ロボット内には,バッテリーの電圧をモニターし,必要に応じて電流を供給する自動充電器が内蔵されているため,接触型充電装置に接触している間は,移動ロボットの通電状態を保ったまま,バッテリーへの充電を行うことができる.すなわち移動ロボットの待機時は,接触型充電装置に接触させておけば良いことになる.この接触型充電装置には,誤って人が触れても電流が流れないように,移動ロボットの2つの接触端子の両方が接触したときのみ電流が流れるようになっている.また,移動ロボットが接触型充電装置に接触し通電状態になっている場合,移動ロボットに表示ランプが点灯することで,通電状態であることを操作者が確認できるようにしている.

図3.3.1 研究室に設置された接触型充電装置

図3.3.2 接触型充電装置に接触している移動ロボット
3.4 接触型充電装置へのドッキング制御
接触型充電装置と移動ロボットの接触(ドッキング)を容易化するために,ドッキング制御を構築した.接触型充電装置と移動ロボットを接触型充電装置とドッキングさせるためには,移動ロボットの接触端子を,接触型充電装置の接触端子と接触させ,押し込むような力を加える必要がある.もちろん,手動操作移動ロボットの位置・向きを制御し,ドッキングさせることもできるが,これを容易化するために,本研究ではボタンひとつでドッキングさせる制御を構築した.
移動ロボット側で接触型充電装置の位置を検出するために,接触型充電装置の2箇所に低反射素材を取り付けている.移動ロボットのレーザーレンジファインダは,レーザーの反射により距離を検出するため,この素材に照射されたレーザーは,反射をせず,この2箇所の位置が無限遠扱いとなる.図3.4.1の赤く示されたところが,レーザーレンジファインダの計測値で,無限遠扱いとして計測された接触型充電装置の位置である.これを利用して,接触型充電装置の位置を特定し,左右輪を自動制御することで,移動ロボットを接触型充電装置にドッキングさせる.これにより,操作者は,移動ロボットの使用後,接触型充電装置付近まで移動ロボットを移動させ,最後にボタンを押すだけで,接触型充電装置へのドッキングが完了する.
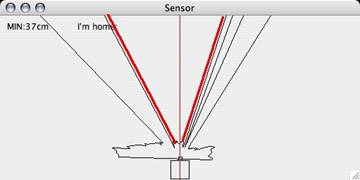
図3.4.1 接触型充電装置の位置の検出
3.5 室内のドア・照明・カメラの遠隔制御
本研究では,ネットワークによる移動ロボットの操作を容易化・利便化するための,移動ロボットが設置されている室内の機器についても,開発を行った.以下の各項では,開発した各機器について説明する.
3.5.1 研究室ドアの自動化
研究室外から操作を行って移動ロボットを室外に出す場合,ドアの開閉が必要となる.もちろん,ドアを常時開けておくことは,防犯上好ましいことではない.本研究では,研究室のドアにアクチュエータを取り付け,ネットワークからの操作で開閉できるようにした.図3.5.1に自動化したドアの写真を示す.具体的には,ドアの下部に車輪をつけ,モーターで駆動し,ドアの開閉動作を行う.図3.5.2にドアの開閉を行うアクチュエータを示す.さらにドアのカギ部分にも小型サーボモーターを取り付け,ドアの開錠・施錠を行う.これらのアクチュエータをマイコン経由およびネットワーク制御機能付リレーを用いて,ネットワークから制御できるものとした.これにより,ドアを開く指令を送れば,ドアを開錠し,その後ドアを開くことができる.ドアを閉める指令を送れば,ドアを閉め,その後施錠を行う.この機器により,移動ロボットの操作者は,研究室外からの操作で,移動ロボットを操作し,研究室外に移動させることが可能となった.

図3.5.1 自動化されたドア

図3.5.2 ドアを開閉するためのアクチュエータ
3.5.2 照明の自動化
研究室外から操作を行って移動ロボットを操作する場合,夜などに部屋が暗い場合,カメラの映像が十分に見えず,操作が困難な場合がある.本研究では,研究室の照明をネットワーク経由でON・OFFできるようにした.具体的には,研究室の蛍光灯照明の配線にネットワーク制御機能付リレーを取り付け,ネットワーク経由での照明制御を可能とした.さらに,これで照明がつかない場合(元の蛍光灯照明スイッチがOFFの場合には点灯させることができない)に対応するため,図3.5.3に示すような500Wのハロゲンランプを取り付け,ネットワーク経由でON・OFFできるようにしている.

図3.5.3 補助照明
3.5.3 俯瞰カメラ
研究室外から操作を行って移動ロボットを操作する場合,研究室内に雑多においてある機器・椅子との衝突の恐れがあり,移動ロボット上のカメラやレーザーレンジファインダの情報のみでは,操作しにくい場合がある.本研究では,図3.5.4のように研究室内にロボットの移動エリアを俯瞰する可動式のカメラを設置し,ネットワーク経由での映像取得を可能としている.これにより,俯瞰映像を見ながらの移動ロボットの操作が可能となり,研究室内を効率的に移動したり,接触型充電装置への接触を容易にすることを可能とした.図3.5.5は,俯瞰カメラで取得した映像である.

図3.5.4 天井に取り付けられた可動式俯瞰カメラ

図3.5.5 俯瞰カメラの映像
4.成果のまとめと今後の展望
4.1 成果のまとめ
本研究では,情報ネットワークと親和性の高い移動ロボットの開発として,IPアドレスを持ったアクチュエータとセンサを幾何的な拘束に基づき配置すること構成した移動ロボットと,それを情報ネットワーク経由で操作を利便化するインターフェースおよび機器を開発した.具体的な開発項目は以下の通りである.
· 移動ロボット(寸法53cm(幅)×53cm(奥行)×72cm(高さ,ネットワークカメラを含まず),最高速度2km/h,並進・回転運動が可能,積載重量200kg以上,SFC内外のコンピュータから,運動の制御,周囲物体の距離情報の取得,周囲映像情報の取得,周囲音声情報の取得,鉛直軸周り回転角速度取得,音声の発生,電源の制御が可能)
· 操作用インターフェース(PCにおけるマウス操作で,移動ロボットの制御,情報の取得が可能)および,接触型充電器との自動ドッキング制御,自動壁沿い走行制御のアルゴリズム
· 接触型充電装置,自動ドア,自動照明,俯瞰カメラ等,移動ロボットの情報ネットワーク経由の操作を容易化・利便化する機器
本研究で開発した機器・ソフトウェアにより,実際に,研究室内の接触型充電装置に接続している移動ロボットを操作し,室外に出,室外を巡回し(同一フロア内),巡回後,室内の充電装置と接続するような一連の操作を可能であることを確認している.この際,室内の照明制御,ドア錠の開閉,ドアの開閉も,IPアドレスを持ったアクチュエータにより実現しているため,移動ロボットの運用者は,これらも同一のPCから制御可能である.巡回においては,カメラによる移動ロボット周りの映像の取得,マイクによる音声情報の取得が可能である.また,操作しているPCにマイクがついている場合,このマイクを利用して,移動ロボットのスピーカーから音声を発することも可能である.
本研究の成果は,情報ネットワークと機械システムの融合のSFCにおける第一歩となるものであり,これを核として,様々な応用を呼び込むことができると考える.本研究で制作した移動ロボットは,柔なロボット玩具ではなく,実用に絶え得る強度(積載重量200Kg以上)と大きさを有するものである.また,情報系の多くの学生が得意なインターネットを経由して制御することができる.本研究の成果物は,SFC内の様々な学生,研究者が,力学や制御,電装系構築等の障壁を感じることなく,バーチャルワールドとリアルワールドを結びつけるアイデアを具現化していくためのツールとなり,本研究期間の終了後も様々な応用研究のプラットフォームとしての役割を果たしていくことを期待している.
4.2 今後の展望
今後の展望について述べる.本研究では,研究の申請において,情報ネットワークの断絶時・遅延時の影響を評価することも研究項目として記載していた.しかし,本研究期間に,情報の遅延においては,自動壁沿い走行制御の評価等においてある程度のデータを得たものの十分とは言い難く,情報ネットワークの断絶時については定量的な評価をできなかった.今後の研究においては,まず,上述のやり残した研究を進め,同時に,開発した移動ロボットの機能拡張と運用を進めていきたいと考えている.現在の移動ロボットは,SFC内外から操作してイオタ棟2階のフロアをうろついたり,映像を見たり,音声を拾ったり,音声を発したりできるだけである.これだけは,偵察とコミュニケーションのみにか役に立っていないのが実情である.今後は,この移動ロボットにマニピュレータを取り付け,外部への力学的作用を可能とし,ルーティング,エレベータの利用等により,移動の範囲を拡大することで情報ネットワークと機械システムの融合が持つ様々な可能性を模索していきたい.
研究の継続的推進に加え,本研究助成の趣旨である外部資金獲得に向けても,本研究成果を基に精力的な努力を行いたいと考えている.現時における具体的な成果としては,メーカーの方と打ち合わせをしているときに,本研究で開発した移動ロボットを新川崎タウンキャンパスから操作するデモを行ったところ,大きな興味を持っていただくことができた.現在,その企業と具体的な共同研究開始に向けての打ち合わせが終わり,契約の段階に進んでいる.本研究の成果が本件助成の趣旨に適いつつある手応えを感じている.今後は,本研究の成果を基に競争的資金への積極的応募を行い,外部資金の獲得を目指したいと考えている.