2011年度SFC研究所プロジェクト補助研究成果報告
「自動運転テストライドシステムの開発」
慶應義塾大学 大学院政策・メディア研究科 大前 学
概要
本研究では,一般の方の搭乗による安全な試乗走行や運用評価を可能とする自動運転のテストライドシステムをした.テストライドにおいては,一般の方の搭乗を前提とした高い信頼性と安全性を実現する自動運転車両の構築が必要となる.そのため本研究では,従来構築してきた自動運転実験車をベースに,
・ サブシステムのコンポーネント化,冗長化および別目的のサブシステムとの協調による失陥補償アルゴリズムの開発による耐障害性向上
・ 故障診断アルゴリズムの開発や衝突防止機能による失陥時安全性の向上
を実現した車両を開発した.
東京モーターショー2011において,開発した自動運転車両4台によるデモ走行を3日間実施し,無事故で20セット(1セット走行距離1.5km程度)以上の自動運転走行(隊列走行,無人回送,単独自動運転)を実施し,本研究で開発した車両の信頼性と安全性を実証した.
本研究の成果は,自動運転において,一般の方のテストライドを伴う運用を可能とする車両をもたらしたことである.これは,今後,利用者からのフィードバックによるシステムの洗練化,および社会的受容性を評価することを可能し,自動運転の高度化や実用化に資する情報を収集するためのプラットフォームとして本研究の成果を活用することが期待できる.
1.研究の背景
自動車交通の諸問題を解決することを目的としてITS(Intelligent Transport Systems)の名のもとで様々な研究が推進されている.その技術分野の中に運転支援システム,自動運転システムがある.運転支援システムにおいては,認知支援技術(衝突警報,夜間歩行者検出等),運転支援技術(車線逸脱防止,車間距離制御機能付クルーズコントロール,パーキングアシスト等)が実用化されている.一方で,自動運転システムは,人の移動,物流における運転負荷軽減,安全性の向上,そして交通容量の飛躍的な増大を実現する技術として期待されているものの,絶対に誤動作を起こさない信頼性の確保等の技術的な課題,事故責任や社会的受容性,制度等の課題があり,現時では専用軌道上での自動運転バス等の限定的な範囲での実用化に留まっている.自動車の自動運転が,現在実用化されている限定的な運用を越えて,「いつでも,だれでも,どこへでも行ける」技術として,実用化されるための障壁は,自動運転の信頼性や例外的事象への対処などの技術的課題加え,法制度の未整備,事故責任の問題,社会受容性等の非技術的課題もある.ここで,社会受容性に目を向ければ,自動運転の良し悪しを,利用者の視点に立って評価し,フィードバックを行うことで,システム構成,運用構成を洗練し,利用者の受容性が高いシステム開発するための指標やゴールの像を見出せる可能性がある.
2.研究の目的
本研究の目的は,自動車の自動運転システムのテストライドシステムを構築し,自動運転の社会受容性を評価し,同時に自動運転の実用化に対する社会受容性を醸成するためのテストベンチを構築することである.具体的には,一般の方が安全に試乗可能な,小型電気自動車を利用した構内運用可能な自動運転システムを構築することである.構築する自動運転テストライドシステムにおいては,従来構築してきた自動運転実験車両をベースに,一般の方の安全な試乗を実現する車両の構築を目的に以下のことを達成する.
・ サブシステムのコンポーネント化,冗長化および別目的のサブシステムとの協調による失陥補償アルゴリズムの開発による耐障害性向上
・ 故障診断アルゴリズムの開発や衝突安全機構による失陥時安全性の向上
・ 東京モーターショー2011で,構築したテストライドシステムを運用し,構築した自動運転テストライドシステムの有効性を実証する.
3.研究成果
本研究で構築した自動運転車両の基本的な機能は,
・ 絶対位置情報で記述された目標軌道に追従する自動経路走行
・ 走路上の障害物への衝突防止
・ 近接して走行する車両との隊列形成
・ 高密度な隊列走行
・ 隊列解消,隊形変更
である.本研究の範囲では,機能の追加や拡張を対象とせず, 研究の目的で述べた耐障害性の向上と失陥時安全性の向上により,これらの機能を安全に実現する車両を構築した.以下では,研究目的で述べた達成目標の項目に従い,その成果を述べる.
3.1 サブシステムのコンポーネント化,冗長化および別目的のサブシステムとの協調による失陥補償アルゴリズムの開発による耐障害性向上
サブシステムのコンポーネント化においては,自動運転を実現するための機能(センサーの計測,障害物検出,車線検出,制御出力等)について,従来一つのプログラムとして記述されていたものを,図1のように,機能ごとにコンポーネントに分割し,各機能を独立したブログラムとした.(厳密には,複数のコンポーネントを一つのプログラムとして記述しているものもある.)これにより,各コンポーネントの処理負荷を正しく見極めることや,プログラムの見通しを良くしてミスを減らすことが可能となった.
コンポーネント同士の情報通信においては,インターネットで用いられるUDPマルチキャストを用いた.ここで,各コンポーネントは,処理した情報をUDPマルチキャストを用いて発信することになる.情報を発信するコンポーネントをコンポーネントAとすると,他のコンポーネントの中で,そのコンポーネントAの処理結果を用いる場合は,マルチキャストされたコンポーネントAの情報を用いる.マルチキャストを用いることにより,各コンポーネントにあらかじめ情報の送信相手を設定する必要がないため,後付のコンポーネントが既存のコンポーネントの情報を使うことが可能である.また,車両単体内でのコンポーネント協調のみならず,無線LANを利用した車両外のコンポーネントとの協調や負荷の高いコンポーネントの処理を他のPCに移して処理させるなど,高い拡張性を持たせることを可能とした.
冗長化や別目的のサブシステムとの協調による失陥補償アルゴリズム,車車間通信の二重化(2.4GHz帯と5GHz帯の通信),車速計測の二重化(車輪速計測とGPS),車間距離計測の二重化(車車間通信で得た他車の車両絶対位置情報の比較,レーザーレーダー)を行い,一方の計測や通信が失陥しても,安全な走行を継続することを可能とした.
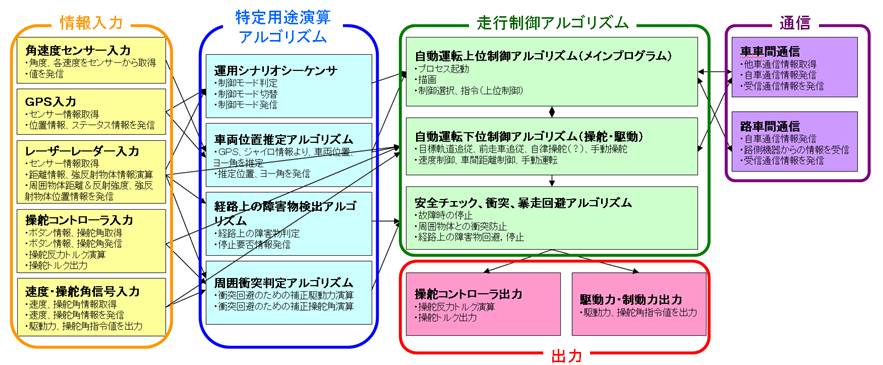
図1 自動運転システムのコンポーネント
3.2 故障診断アルゴリズムの開発,衝突防止機能による失陥時安全性の向上
故障診断としては,各センサーの動作状況,計測状況,制御結果をモニタリングし,動作異常を検出するアルゴリズムを構築した.ここで異常とは,単に機器の異常を指すだけでなく,通信状況の悪化による情報伝送遅延,周辺の構造物やGPS衛星配置によるGPS受信機の測位精度の低下,物体等の飛来や雨滴の影響によるレーザーレーダー計測値の急変等,安全な自動運転の妨げとなる要因のことをさす.異常あるいは,その予兆が検出された場合,画面にメッセージが表示され,代替系による安全が確保できない場合は,車両が停止するものとした.また,隊列走行時には,全ての車両を一斉停止させることで,異常停止による隊列走行中の車両衝突を防止した.このような制御プログラムによる安全性の確保に加え,運転者の手の届き易い位置に非常停止ボタンを設置し,搭乗者による容易な停止も可能とした.また,万が一の衝突時の衝撃を低減させるため,車両の外周に樹脂製の緩衝材とゴムバンパーを取り付けた.図2に車両に取り付けた衝突安全バンパーと非常停止スイッチの写真を示す.

図2 衝突安全バンパーと非常停止スイッチ
3.3 東京モーターショー2011における自動運転テストライドシステムの有効性の実証
2011年12月に東京ビックサイトにて,東京モーターショー2011が開催された.この中の主催者テーマ事業Smart Mobility 2011において,次世代自動車試乗会・自動運転デモに本研究で構築した自動運転テストライドシステムを出展した.
自動運転デモは,4台の車両にて行い,未来の移動スタイルの提示として,オンデマンド自動運転と幹線道路における隊列走行のデモンストレーションを行うものとした.隊列走行においては,NEDOエネルギーITS推進事業にて,報告書らが開発しているトラックの隊列形成システムの成果を小型電気自動車用にアレンジした.シナリオは,以下の通りである.
(1)車両を呼び出す
(2)駐車場に停止している4台の車両が自動発進し,搭乗者のところへ無人で自動迎車
(3)車に搭乗後,ボタンを押して発進
(4)単独車両の自動運転でしばらく走行
(5)幹線道路に入ったという想定で,4台の車両が一列縦隊の隊列を形成
(6)車間距離30cm程度の隊列走行
(7)隊列の順番の入れ替え(3,4台目の車両が1,2台目の車両間に割り込む)
(8)2列縦隊への隊形変更
(9)1列縦隊への隊形変更
(10)隊列を解消し,単独自動運転による走行
(11)目的地到着,搭乗者が降りる
(12)駐車場まで,無人で自動回送
上記のシナリオを新川崎タウンキャンパスにて運用できるようにプログラムの上位制御を構築し,連続運用走行試験を繰り返し,問題点の抽出と改良を行なった.結果として,電源装置のインバータからの漏電による機器の故障や長時間の走行によるセンサの原点のドリフト等,短時間の走行では,再現できないような問題点を発見し,その対策を打つことができた.
11月28日に東京ビッグサイトへの搬入を行い,1日間の準備を経て,12月1日(プレスデー),12月2日(特別招待日)の午前,12月3日(一般公開日初日)の午後に自動運転のデモンストレーションを行った.本研究で構築したテストライドシステムは,一般の方の試乗を想定して構築したものであるが,東京モーターショー開会1週間前に,「オペレータが同乗できない車両の一般試乗は行なわない」との決定がなされ,本テストライドシステムの運用はスタッフによるデモ走行となった.12月1日は午前3セット,午後2セット,12月2日,3日は,共に10セットの連続走行を行った.走行中は,センサーの計測値不良により非常停止することがあったが,予期せぬ暴走や誤動作等は一切なく,安全に走行することができ,本研究で構築したシステムの有効性を実証することができた.図3にデモ走行の写真を示す.動画1に,デモ走行の様子の動画を示す.

図3 東京モーターショーにおける自動運転デモンストレーションの様子
動画1 東京モーターショーにおける自動運転デモンストレーションの様子
4.まとめ
本報告書では,SFC研究所プロジェクト補助にて補助金を賜った「自動運転テストライドシステムの開発」について,その成果を報告した.本研究における車両プログラム構築,車体構築,出展準備,当日運営を円滑に遂行することができたのは,本補助金に依るところが大きく,関係者の皆様に心より感謝の念を申し上げる.本研究の成果を礎に,SFCにおける自動車の自動運転研究をさらに発展させ,同時に関連研究における外部資金獲得につなげていきたい.