評価と考察
システムの精度
精度の比較は、バイヨン南経蔵北壁面に図 のように17個所貼付したプリズムシートの座標点に関して行った。
これらのデータはズーム値15(最広角)で撮影した
1組のペア画像をもとに計測を行った。このデータ取得時のシステムの方位角は179.5°であり、建物に対して正対して撮影している。また、地理座標軸に対してほぼ一致しており、このデータによるX方向は画面の横軸方向、Y方向は画面の奥行方向、Z軸は画面の縦軸方向とほぼ等しい。 この結果、画面横方向(X誤差)の平均二乗誤差は±0.122mでもっとも精度が高く、画面縦方向のZ誤差は±0.675m、奥行のY誤差は最も精度が悪く±0.741mとなっている。一般的に奥行方向の計測では、視差算出のずれや基線長、焦点距離のずれなど様々な要因が影響してくるため精度が落ちる。また、本システムではカメラを左右に並べて撮影しているため縦方向には画像の視差が無い。このため、
Z座標(画面縦方向)には誤差が大きくなっていることが分かる。この
X、Y、Z方向の誤差の分布に関して等高線を描いたものが図である。この図では、緑色の部分ほど誤差が少なく、赤い部分ほど誤差が多いことを表す。X方向(横方向)の誤差では画像の左右両端に行くほど誤差が多くなっている。Y方向(奥行方向)の誤差では、中心で誤差が少なくそこから放射状に誤差が増えて行くことが分かる。また、Z方向(縦方向)では上の方に行くほど誤差が大きくなっている。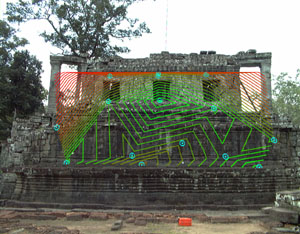
図 奥行方向の誤差
誤差の要因とその解決
このように、中心付近では目標の約10cmの精度を保てているが、画面周辺部分などでは誤差が大きくなっており、誤差を軽減する方法を検討する必要がある。本システムにおいて誤差に影響してくる要因としては以下のような点が考えられる。データの取得条件によって違ってくる誤差
| |||||||||||||||
ソフトウェア的に解決が可能な問題による誤差
| |||||||||||||||
ハードウェアに起因する問題による誤差
|
レンズ歪曲の補正による誤差の向上
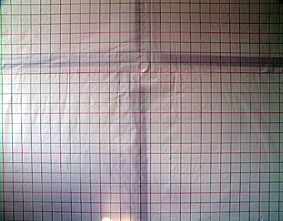 本システムで用いたデジタルカメラのレンズには図のような樽型の歪みが発生している。しかし、レンズ歪曲パターンはカメラごとに決まったもので再現性があるものなので、あらかじめ正確なマトリックスなどを撮影して、歪曲パターンを記録しておくことでソフト上で誤差を補正することが可能になる。そこで、レンズ歪曲による影響を確認するためにテストベッドを作成して、歪曲パターンを取得し、補正を行った。
本システムで用いたデジタルカメラのレンズには図のような樽型の歪みが発生している。しかし、レンズ歪曲パターンはカメラごとに決まったもので再現性があるものなので、あらかじめ正確なマトリックスなどを撮影して、歪曲パターンを記録しておくことでソフト上で誤差を補正することが可能になる。そこで、レンズ歪曲による影響を確認するためにテストベッドを作成して、歪曲パターンを取得し、補正を行った。
テストベッドは長さ5mのレール上でカメラをのせた土台を前後に動かしながら、正規マトリックスを撮影するものである。正規マトリックスは180cm四方の紙の上に10cm刻みのマス目を印刷したもので、カメラのセンサ面に対して平行(光軸に対して垂直)に設置する。撮影は左右それぞれのカメラで2から15までの各カメラズーム値ごとに行い、レールの上を前後に動かしながら画面全体にマトリックスが写るように撮影する。。この図を見ると、中心のマス目では1マスが47ピクセル四方であるのに対して、端の方では44ピクセル程度になっており樽型の歪みが発生していることが分かる。もし、歪曲がなければ、画像全体のマス目が中心付近と同じ47ピクセルでマス目が描画されることになる。
このような歪曲のある画像から歪曲の無い正規マトリックス画像への変換パラメータを導き出して、それに合わせて再配列(
resampling)することで幾何補正(Geometric Correction)を行い、計測誤差を軽減できるものと思われる。 この結果、補正前にはX、Y、Z軸方向にそれぞれ±0.122m、±0.741m、±0.675mの誤差があったのに対して、補正後には±0.105m、±0.45m、±0.255mの誤差へと軽減していることが分かる。以上の結果から歪曲補正を行うことで精度を向上できることが分かった。測量作業の効率化
測量作業の能率は使用する機材、目的とする縮尺や精度によって変わってくるほか、特に従来のような測量機器では作業員の熟練度や作業方法などにも大きく影響を受けることになり、簡単に比較することはできない。今回は従来の方法による測量作業を行っていないので、定量的に効率性に関する分析を行うことはできないが、作業内容について比較を行いたい。
一般に考古学の現場における測量では、水糸などを現場に張ってグリッドを切って巻尺で計測していくような作業が必要であり、その準備作業だけでも多くの時間や人手を必要とする。測量機器を用いる場合は、トランシットで角度を測り、巻尺や光波距離計で距離を測るという組み合わせで測量を行うことが一般的である。最近は、これらが一つになってコンピュータ制御されているトータルステーションを用いることも多い。いずれの場合にせよ、このような従来の測量機器では「点」ごとの座標を取っていることになる。このような測量ではすべての点を測量し終わるまで現場を離れることは出来ない。線画図面の作成は、この「点」どうしを手作業で緻密につないでいくことで行う。この製図作業は現場でのデータ取得をした後、夜間などに行われることが多い。このような測量、製図の作業は複雑であり、オペレータには技術力や知識が要求されてくる。
それに対して、本システムでは現場での作業はシステムの設置と写真撮影だけであるので非常に短くて済む。写真では「面」的にデータを取得できるので、データ取得にかかる時間も大幅に削減される。取得したデータをもとに実際に測量をしたり製図する作業は、現場で行ってその場で表示することも可能であり、後で行うこともできる。
表
は本システムで計測を行うのにかかる時間を概算したものである。計測にかかる時間は南経蔵西壁面に関して図面を作成することを想定して概算した。GPS 基地局設置 |
10 分 |
システムの設置組み立て |
10 分 |
カメラの平行性調整 |
15 分 |
撮影(データ取得) |
3 分 |
計測 |
3 時間 |