3次元計測システムの構築
システムの概要
システム全体は大きく分けて、高精度にシステムのグローバルな位置座標や方向などを取得する「位置取得部分」と、写真測量によって形状やテクスチャを取得する「デジタルフォトグラメトリ部分」、およびこれらを統合するソフトウェアからなる。
「位置取得部」ではまず、
RTKGPSを用いてシステムを設置した地点のグローバルな位置座標を取得する。さらに、その座標を基点としてノンプリズム型トータルステーションで対象物までのX、Y、Z座標を計測する。これらを加算することで、対象物の中心のグローバルな座標、システム(カメラ)の向きなどを決定することができる。「デジタルフォトグラメトリ部」では、デジタルスチルカメラを
2台用いてステレオペア画像を取得し写真測量を行うことで、対象物全体の形状、テクスチャなどを取得するものである。計測機器の接続
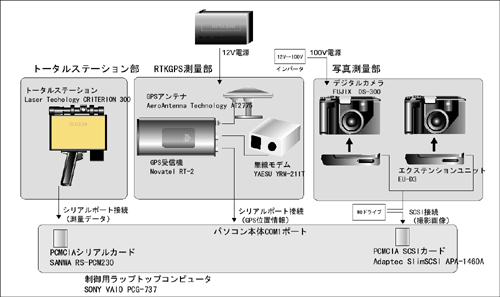
これらのRTKGPS、ノンプリズム型トータルステーション、2台のデジタルカメラはすべてラップトップコンピュータに接続されている。RTKGPSとトータルステーションは両方ともシリアルポート接続であるため、カード型増設シリアルポート(SANWA SUPPLY PCMCIA高速シリアルカードRS-PCM230)を利用し、RTKGPSは本体のCOM1ポート、トータルステーションは増設したCOM2ポートに接続した。2台のカメラはSCSI接続であるが、カメラ側には1つしか接続口が無いためにケーブルを分岐させるT字型コネクターを自作して2台のカメラを接続した。パソコン側のSCSIインターフェースにはSCSIカード(Adaptec SlimSCSI APA-1460A)を利用した。また、このカメラはSCSIの終端電源を供給しないため、本システムのようにPCMCIAのSCSIアダプターを用いている場合には間にMOドライブやハードディクスなどのSCSI機器を間に接続する必要がある。機材の接続状況を図 に示す。
機材の組み立て
計測を行う際にはカメラの幾何学的関係が既知である必要がある。特に、本システムのように基準点無しにリアルタイムに写真測量を行うためにはカメラ側で位置関係などのパラメータがわかっている必要がある。このためには、左右カメラの位置関係を常に同じにする必要があり、このシステムの再現性を考慮すると、
2台のカメラを平行に配置することがもっとも再現性が高いと思われる。また、平行に配置されているという拘束があれば、視差や焦点距離を利用して比較的簡単に3次元計測を行うことができ、計測のための計算が単純化される。さらに、ステレオマッチングを行う際に対応点を2次元的に探す必要が無く、左右の画像の同一y座標上の直線(エピポーラ直線)だけを探せば良いことになり、非常に効率的になる。これらの理由から、本システムでは平行に配置した
2台のカメラで取得したペア画像を利用して計測を行う「平行ステレオ法」を利用した。ここでいう「平行」とは以下のような要件を満たすことを意味する。左右カメラの光軸は互いに平行 | |
左右カメラのセンサ面と光軸は垂直 | |
左右カメラのセンサ面は光軸と直交する同一平面上にある | |
左右のカメラのセンサの上下それぞれの端は同一直線上にある | |
左右カメラの焦点距離が同じ |
このような左右のカメラの平行関係と同時に、トータルステーションとカメラが同じ軸上で動くようにして、トータルステーションの計測軸方向がカメラの光軸方向が平行になる必要がある。これにより、トータルステーションで測量した方位角と仰角のデータをそのままカメラ光軸の方位角や仰角として利用することができる。
以上の様にして図のようなシステムを構築した。

